 Abstract
Abstract
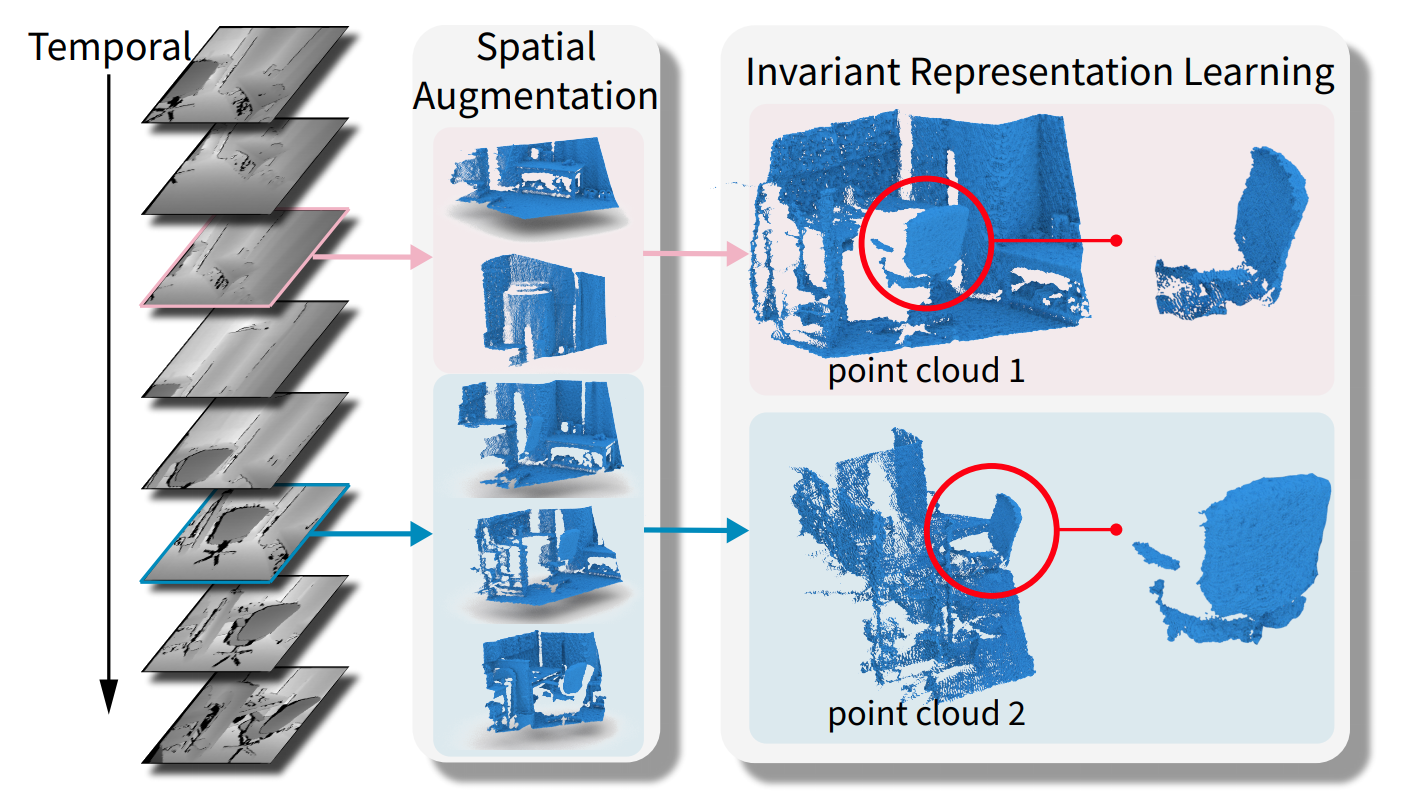
To date, various 3D scene understanding tasks still lack practical and generalizable pre-trained models, primarily due to the intricate nature of 3D scene understanding tasks and their immense variations due to camera views, lighting, occlusions, etc. In this paper, we tackle this immanent challenge by introducing a spatio-temporal representationlearning (STRL) framework framework, capable of learning from unlabeled 3D point clouds in a self-supervised fashion. Inspired by how infants learn from visual data in-the-wild, we explore the rich spatio-temporal cues derived from the 3D data. Specifically, STRL takes two temporally-correlated frames from a 3D point cloud sequence as the input, transforms it with spatial data augmentation, and learns the invariant representation self-supervisedly. To corroborate the efficacy of STRL, we conduct extensive experiments on synthetic, indoor, and outdoor datasets. Experimental results demonstrate that, compared with supervised learning methods, the learned self-supervised representation facilitates various models to attain comparable or even better performances while capable of generalizing pre-trained models to downstream tasks, including 3D shape classification, 3D object detection, and 3D semantic segmentation. Moreover, spatio-temporal contextual cues embedded in 3D point clouds significantly improve the learned representations.
Paper
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds
Siyuan Huang*, Yichen Xie*, Song-Chun Zhu, Yixin Zhu
International Conference on Computer Vision (ICCV) 2021
Paper /
Supplementary /
Project /
Code