I am a Research Scientist at Beijing Institute for General Artificial Intelligence (BIGAI), where I
direct the Center of Embodied AI and Robotics.
I received my Ph.D.
from Department of Statistics at University of California, Los Angeles (UCLA). During my Ph.D., I
have interned at DeepMind and Facebook Reality Lab. Before UCLA, I graduated from Tsinghua University with a Bachelors in
Department of Automation.
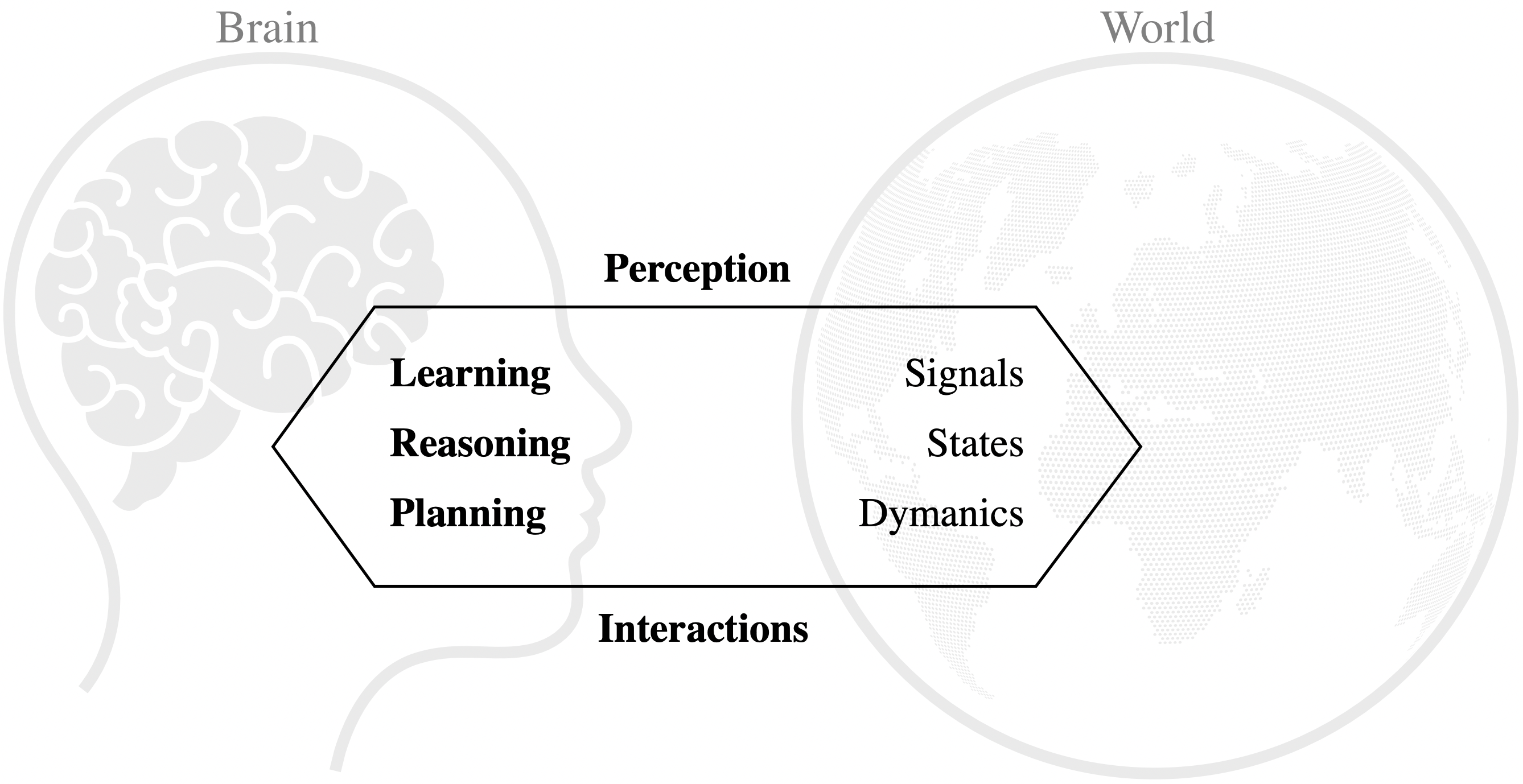
My research interests lie in computer vision, robotics, machine learning, and cognition. My
long-term goal is to build general-purpose intelligent agents that could understand and interact
with the 3D environment like or even beyond humans. I like developing generalizable
robotic models, especially the unified models for solving the perception, interaction, control,
learning, and planning problem. I am currently focusing on general topics in 3D scene understanding,
embodied AI, humanoid robots, and dexterous manipulation.
Prospective students: I co-advise Ph.D. students with researchers at PKU, SJTU,
ZJU, USTC, etc through TongProgram. I am
looking for self-motivated, independent, creative, and ambitious Ph.D. students for conducting
cutting-edge research. Send me CV and research statement if interested.
Hiring: we are hiring research scientists, engineers, and long-term student interns
to join our top-tier research team in 3D scene understanding and embodied AI.
03/2024 Four papers are accepted by CVPR 2024, including three highlight papers! Three of them
are about human motion modeling and skill learning, one is about 3D scene synthesis for embodied
AI!
02/2024 Invited talk at DeepMind Robotics to introduce LEO.
Learning Human-Humanoid Coordination for Collaborative Object Carrying
Yushi Du*,
Yixuan Li*,
Baoxiong
Jia*†,
Yutang Lin,
Pei Zhou,
Wei
Liang†,
Yanchao
Yang†,
Siyuan Huang†
ICRA 2026 Paper / Project / Code COLA provides a proprioception-only policy that enables compliant
human-humanoid collaboration for carrying diverse objects across various movement
patterns.
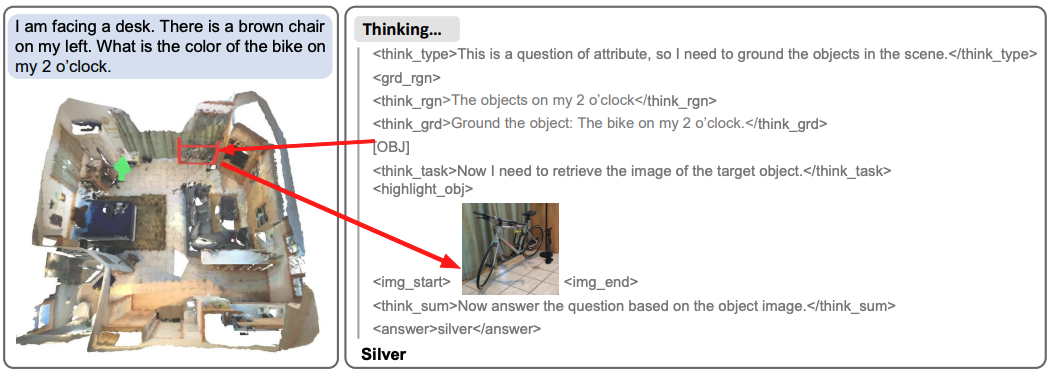
SceneCOT: Eliciting Grounded Chain-of-Thought Reasoning in 3D Scenes
Xiongkun Linghu,
Jiangyong Huang,
Ziyu Zhu,
Baoxiong
Jia†,
Siyuan Huang†
ICLR 2026 Paper / Project / Code SceneCOT elicits grounded chain-of-thought reasoning from 3D-VL models by
explicitly predicting reasoning steps grounded in 3D scenes.
G4Splat: Geometry-Guided Gaussian Splatting with Generative Prior
Junfeng
Ni*,
Yixin
Chen†,
Zhifei Yang,
Yu Liu,
Ruijie
Lu,
Song-Chun Zhu,
Siyuan Huang†
ICLR 2026 Paper / Project We present G4Splat, a geometry-guided framework leveraging generative
diffusion priors to enhance Gaussian Splatting for high-fidelity novel view
synthesis.
GaussianFluent: Gaussian Simulation for Dynamic Scenes with Mixed Materials
Bei Huang*,
Yixin
Chen*†,
Ruijie
Lu,
Gang
Zeng,
Hongbin Zha,
Yuru Pei†,
Siyuan Huang†
CVPR 2026 Oral Presentation Best Paper Candidate Paper / Project GaussianFluent is a framework for simulating and rendering dynamic scenes
with complex mixed materials and fractures.
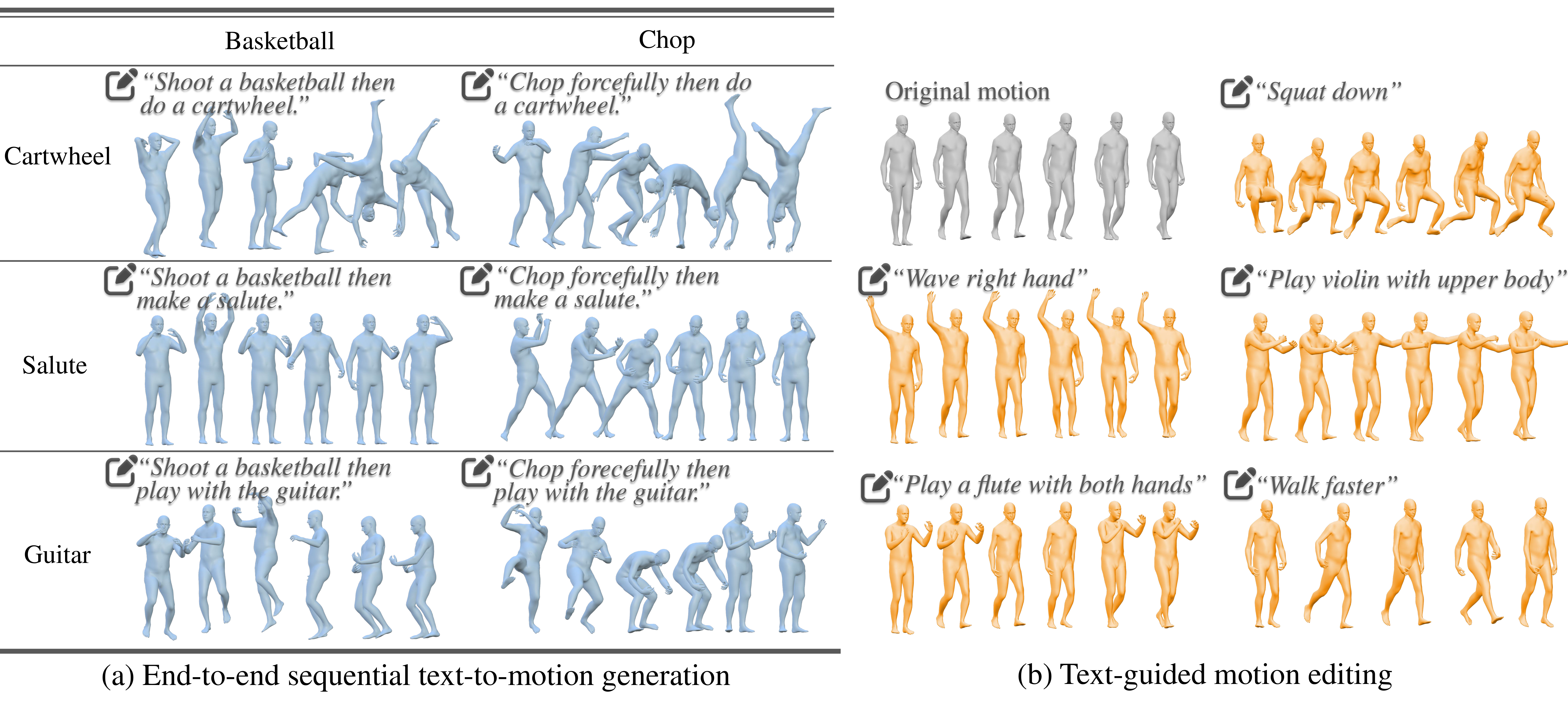
MotionMaster: Generalizable Text-Driven Motion Generation and Editing
Nan Jiang*,
Yunhao Li*,
Lexi Pang*,
Zimo He,
Siyuan Huang†,
Yixin
Zhu†
CVPR 2026 Project / Code MotionMaster finetunes a pretrained MLLM with large-scale motion data to
enable text-generalizable, long-horizon motion generation and editing in a unified
framework.
Mocap-2-to-3: Multi-view Lifting for Monocular Motion Recovery with 2D
Pretraining Zhumei
Wang*,
Zechen Hu*,
Ruoxi Guo,
Huaijin Pi,
Ziyong Feng,
Liang Zhang,
Mingtao Pei,
Siyuan Huang
CVPR 2026 Paper / Project Mocap-2-to-3 is a diffusion-based multi-view lifting framework that exploits
2D motion pretraining to recover metric-accurate 3D human motion with absolute world
positions from monocular video.
Lifting Unlabeled Internet-level Data for 3D Scene Understanding
Yixin Chen,
Yaowei Zhang,
Huangyue Yu,
Junchao He,
Yan Wang,
Jiangyong Huang,
Hongyu Shen,
Junfeng
Ni,
Shaofei Wang,
Baoxiong Jia,
Song-Chun Zhu,
Siyuan Huang
CVPR 2026 Paper / Project / Code We present SceneVerse++, an automated data engine that lifts unlabeled
internet videos into large-scale 3D training data, achieving strong zero-shot
performance across 3D detection, segmentation, spatial VQA, and vision-language
navigation.
DreamArt: Generating Interactable Articulated Objects from a Single Image
Ruijie Lu,
Yu Liu,
Jiaxiang Tang,
Junfeng
Ni,
Yuxiang Wang,
Diwen Wan,
Gang
Zeng,
Yixin
Chen†,
Siyuan Huang†
SIGGRAPH Asia 2025 Paper / Project DreamArt is capable of synthesizing interactable articulated objects from a
single image.
SceneWeaver: All-in-One 3D Scene Synthesis with an Extensible and
Self-Reflective Agent Yandan Yang*, Baoxiong Jia*,
Shujie Zhang,
Siyuan Huang
NeurIPS 2025 Best Paper Award at IROS25 RoboGen Workshop Paper / Project / Code We present SceneWeaver, a reflective agentic framework that unifies diverse
scene synthesis paradigms through tool-based iterative refinement.
CLONE: Holistic Closed-Loop Humanoid Whole-Body Teleoperation for
Long-Horizon
Tasks Yixuan Li*,
Yutang Lin*,
Jieming Cui,
Tengyu Liu,
Wei
Liang†,
Yixin Zhu†,
Siyuan Huang†
CoRL 2025 Paper / Project / Code CLONE is a whole-body teleoperation system that achieves comprehensive robot
control using a VR headset. It enables previously unattainable comprehensive skills,
such as picking up an object from the ground and placing it in a distant bin,
facilitating the collection of long-horizon interaction data.
Learning a Unified Policy for Position and Force Control in Legged
Loco-Manipulation Peiyuan Zhi*,
Peiyang Li*, Jianqin Yin,
Baoxiong
Jia†,
Siyuan Huang†
CoRL 2025 Best Paper Award Paper / Project / Code We propose a unified control policy for legged robots that jointly models
force
and position control learned without force sensors. The policy enables a wide range
of
manipulation behaviors under varying combinations of force and position inputs,
including position tracking, force application, force tracking, and compliant robot
behaviors.
Trace3D: Consistent Segmentation Lifting via Gaussian Instance Tracing
Hongyu Shen*, Junfeng Ni,
Yixin Chen†, Weishuo Li,
Mingtao Pei,
Siyuan Huang†
ICCV 2025 Paper / Project / Code We introduce Gaussian Instance Tracing (GIT), which augments the standard
Gaussian representation with an instance weight matrix across input views.
Move to Understand a 3D Scene: Bridging Visual Grounding and Exploration for
Efficient and Versatile Embodied Navigation Ziyu Zhu, Xilin Wang, Yixuan Li,
Zhuofan
Zhang,
Xiaojian Ma,
Yixin Chen,
Baoxiong Jia,
Wei Liang,
Qian
Yu,
Zhidong Deng, Siyuan Huang†,
Qing
Li†
ICCV 2025 Highlight Paper / Project / Code We introduce Move to Understand (MTU3D), a unified framework that integrates
active perception with 3D vision-language learning, enabling embodied agents to
effectively explore and understand their environment.
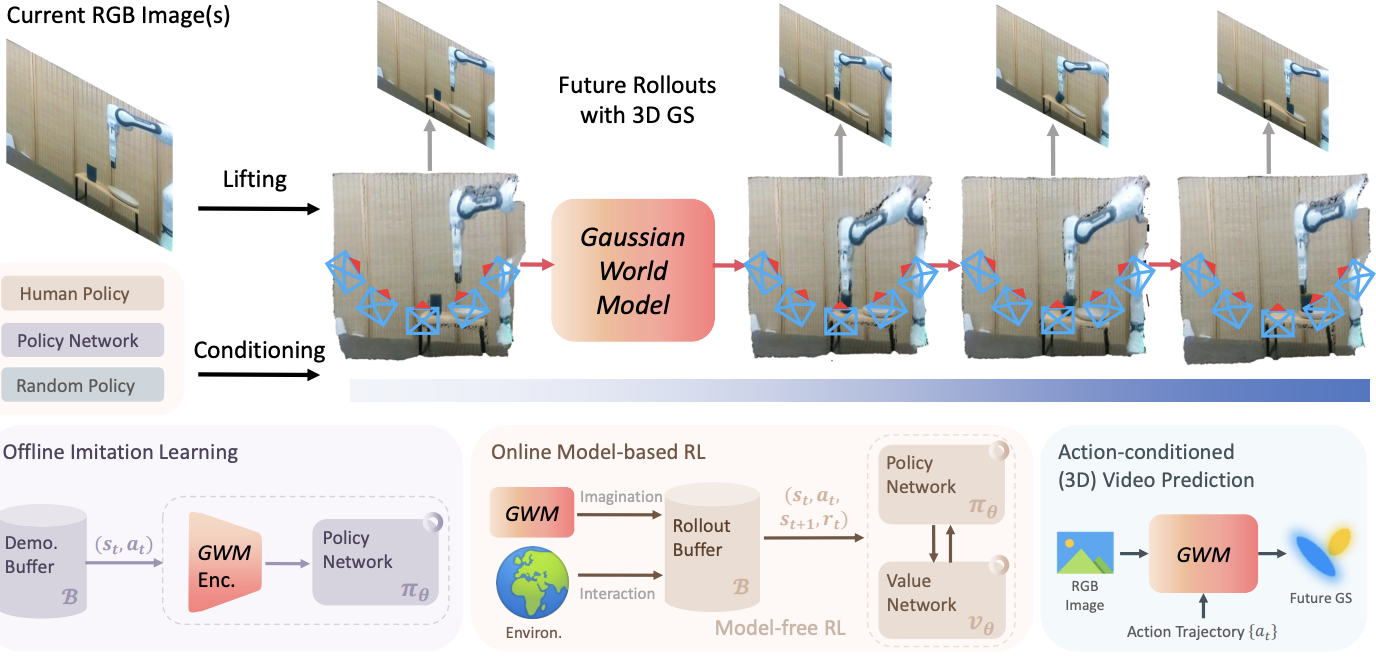
Towards Scalable Gaussian World Models for Robotic Manipulation Guanxing Lu*,
Baoxiong Jia*,
Puhao Li*,
Yixin Chen,
Ziwei Wang,
Yansong Tang,
Siyuan Huang
ICCV 2025 Paper / Project / Code Gaussian World Model (GWM) is a novel branch of world model that predicts
dynamic future states and enables robotic manipulation based on the 3D Gaussian
Splatting representation.
TACO: Taming Diffusion for in-the-wild Video Amodal Completion Ruijie
Lu,
Yixin
Chen†,
Jiaxiang Tang,
Junfeng
Ni,
Diwen Wan,
Gang
Zeng,
Siyuan Huang†
ICCV 2025 Paper / Project / Code We introduce TACO, which repurposes pre-trained video diffusion models for
Video
Amodal Completion (VAC), facilitating downstream tasks like reconstruction.
Ag2x2: Robust Agent-Agnostic Visual Representations for Zero-Shot Bimanual
Manipulation Ziyin
Xiong*,
Yinghan
Chen*,
Puhao Li,
Yixin Zhu,
Tengyu
Liu†,
Siyuan Huang†
IROS 2025 Paper / Project / Code Ag2x2 is a computational framework for bimanual manipulation through
coordination-aware visual representations that jointly encode object states and hand
motion patterns while maintaining agent-agnosticism.
ManipTrans: Efficient Dexterous Bimanual Manipulation Transfer via Residual
Learning Kailin Li,
Puhao Li,
Tengyu Liu,
Yuyang Li,
Siyuan Huang
CVPR 2025 Paper / Project / Code We introduce ManipTrans, a novel two-stage method for efficiently
transferring
human bimanual skills to dexterous robotic hands in simulation. Leveraging
ManipTrans,
we transfer multiple hand-object datasets to robotic hands, creating DexManipNet, a
large-scale dataset featuring previously unexplored tasks like pen capping and
bottle
unscrewing.
MetaScenes: Towards Automated Replica Creation for Real-world 3D Scans
Huangyue Yu*,
Baoxiong Jia*,
Yixin Chen*, Yandan
Yang, Rongpeng Su,
Jiaxin Li,
Qing Li,
Wei Liang,
Song-Chun Zhu,
Tengyu Liu, Siyuan Huang
CVPR 2025 Paper / Project / Code We present METASCENES, a large-scale 3D scene dataset constructed from
real-world scans. It features 706 scenes with 15,366 objects across a wide array of
types, arranged in realistic layouts, with visually accurate appearances and
physical
plausibility.
GROVE: A Generalized Reward for Learning Open-Vocabulary Physical Skill
Jieming Cui*,
Tengyu Liu*,
Ziyu Meng, Jiale Yu, Ran Song, Wei Zhang,
Yixin Zhu†,
Siyuan Huang†
CVPR 2025 Oral Presentation Paper / Project / Code GROVE generates open-vocabulary and physical-plausible motions through
generalized reward. We introduce a generalized reward framework that enables
open-vocabulary physical skill learning without manual engineering or task-specific
demonstrations.
Unveiling the Mist over 3D Vision-Language Understanding: Object-centric
Evaluation with Chain-of-Analysis Jiangyong
Huang*,
Baoxiong Jia*,
Ziyu Zhu,
Yan Wang,
Xiongkun Linghu,
Qing Li,
Song-Chun Zhu,
Siyuan Huang
CVPR 2025 Paper / Project / Code We propose Beacon3D, a benchmark for 3D-VL grounding and QA tasks,
delivering a
perspective shift in the evaluation of 3D-VL understanding.
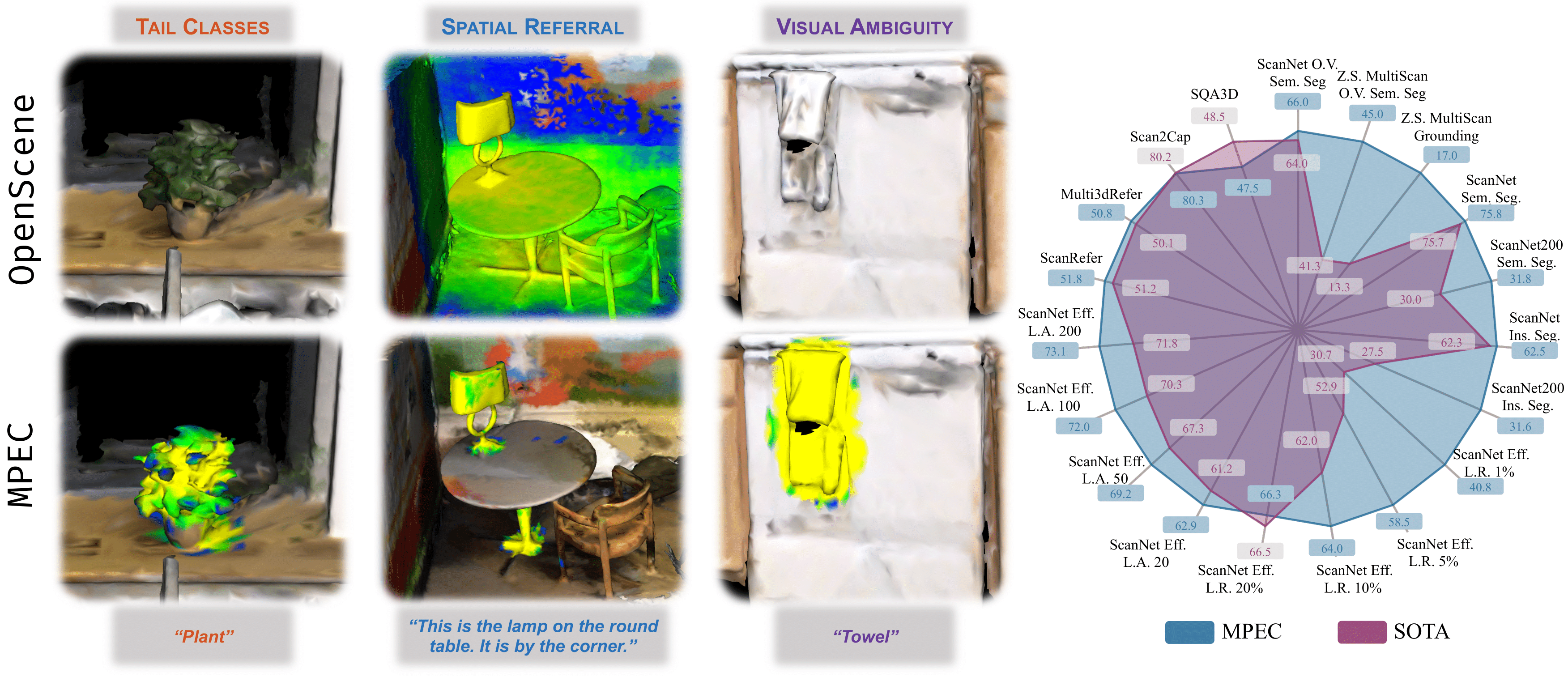
Masked Point-Entity Contrast for Open-Vocabulary 3D Scene Understanding
Yan Wang*,
Baoxiong Jia*,
Ziyu Zhu,
Siyuan Huang
CVPR 2025 Paper / Project We propose MPEC (Masked Point-Entity Contrast) for open-vocabulary 3D scene
understanding. MPEC achieves state-of-the-art on open-vocabulary 3D semantic
segmentation and is more robust to tail classes, visual ambiguity and detailed
descriptions.
Decompositional Neural Scene Reconstruction with Generative Diffusion Prior
Junfeng
Ni,
Yu Liu,
Ruijie
Lu,
Zirui Zhou,
Song-Chun Zhu,
Yixin
Chen†,
Siyuan Huang†
CVPR 2025 Paper / Project / Code DP-Recon incorporates diffusion priors for decompositional neural scene
reconstruction to enhance reconstruction quality in sparsely captured and heavily
occluded regions.
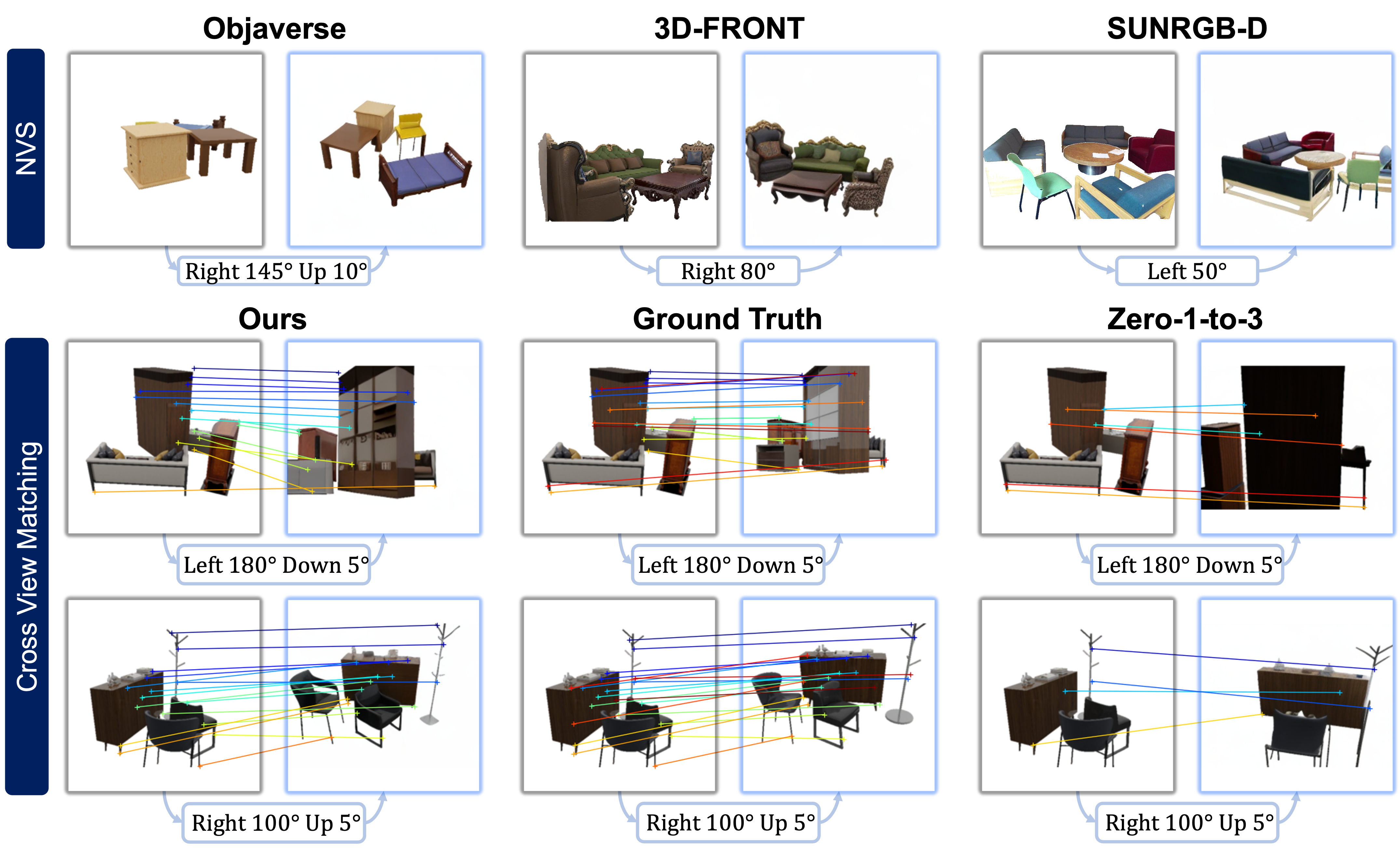
MOVIS: Enhancing Multi-Object Novel View Synthesis for Indoor Scenes
Ruijie
Lu*,
Yixin
Chen*†,
Junfeng
Ni,
Baoxiong Jia,
Yu Liu,
Diwen Wan,
Gang
Zeng,
Siyuan Huang†
CVPR 2025 Paper / Project / Code MOVIS is able to synthesize novel views of indoor scenes with multiple
objects.
It can also match a significantly greater number of points, closely aligned with the
ground truth.
Dynamic Motion Blending for Versatile Motion Editing Nan Jiang*,
Hongjie Li*,
Ziye Yuan*,
Zimo He,
Yixin Chen,
Tengyu Liu,
Yixin Zhu†,
Siyuan Huang†
CVPR 2025 Paper / Project / Code MotionReFit enables seamless spatial and temporal motion edits through
textual
instructions. Powered by our MotionCutMix training strategy, MotionReFit leverages
abundant unannotated motion data to augment scarce editing triplets.
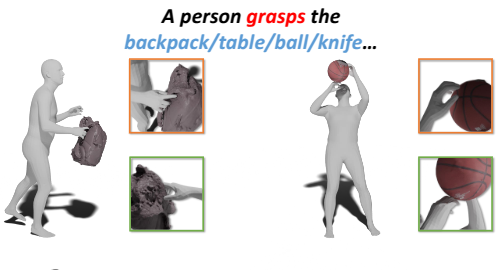
InteractAnything: Zero-shot Human Object-Interaction Synthesis via LLM
Feedback
and Object Affordance Parsing Jinlu Zhang,
Yixin
Chen†,
Zan Wang,
Jie Yang,
Yizhou
Wang†,
Siyuan Huang†
CVPR 2025 Highlight Paper / Project / Code Our method enables the generation of diverse, detailed, and novel
interactions
for open-set 3D objects. Given a simple text description with goal interaction and
any
object mesh as input, we can synthesize different natural HOI results without
training
on 3D assets.
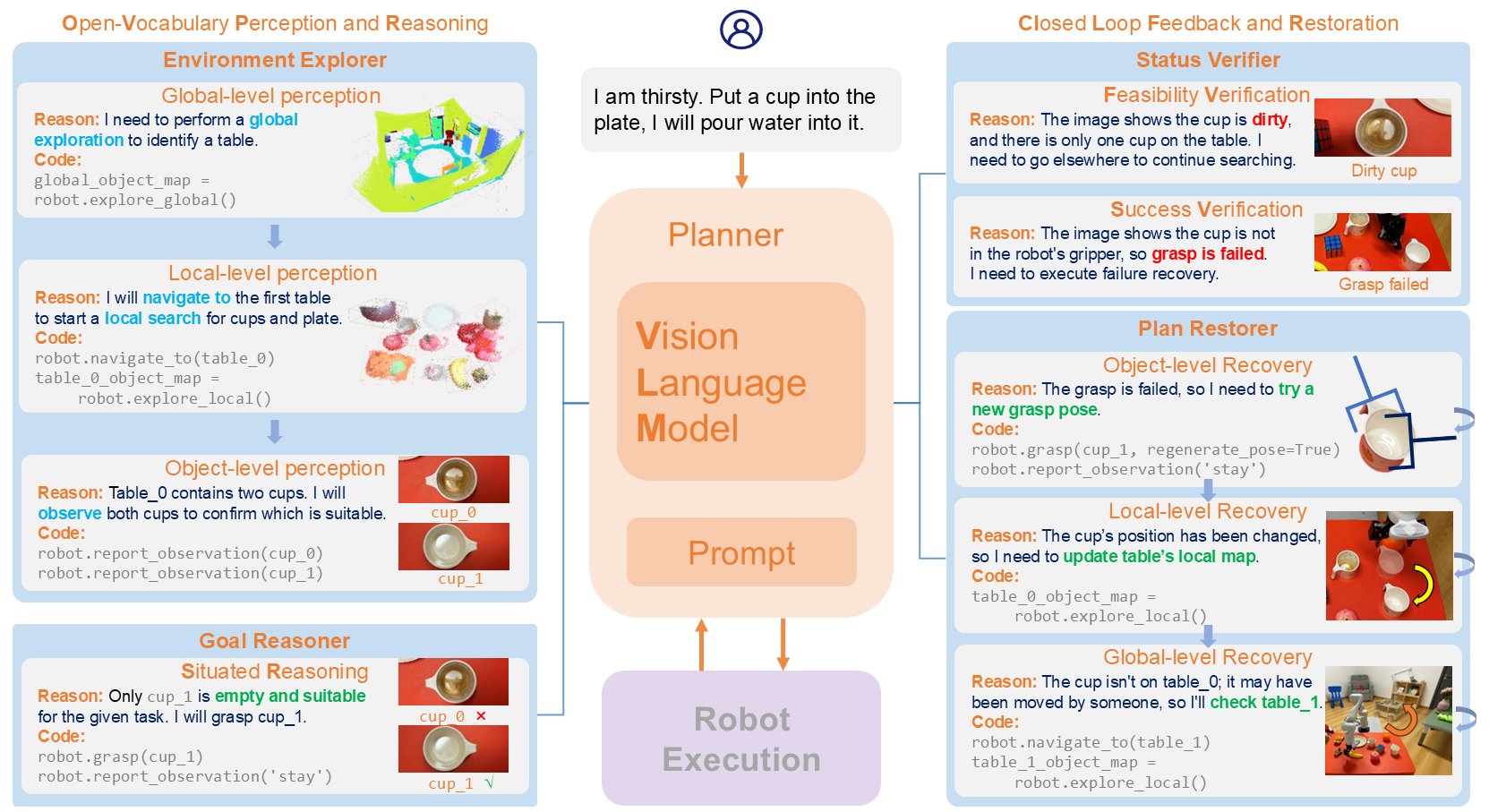
Closed-Loop Open-Vocabulary Mobile Manipulation with GPT-4V Peiyuan Zhi*,
Zhiyuan Zhang*,
Muzhi
Han,
Zeyu Zhang, Zhitian Li,
Ziyuan
Jiao,
Baoxiong
Jia†,
Siyuan Huang†
ICRA 2025 Paper / Project We present COME-robot, the first closed-loop framework utilizing the GPT-4V
vision-language foundation model for open-ended reasoning and adaptive planning in
real-world scenarios.
PhysPart: Physically Plausible Part Completion for Interactable Objects
Rundong Luo*,
Haoran Geng*,
Congyue Deng,
Puhao Li,
Zan Wang,
Baoxiong Jia,
Leonidas
Guibas,
Siyuan Huang
ICRA 2025 Paper We propose a diffusion-based part generation model that utilizes geometric
conditioning through classifier-free guidance and formulates physical constraints as
a
set of stability and mobility losses to guide the sampling process.
SYNERGAI: Perception Alignment for Human-Robot Collaboration Yixin Chen*,
Guoxi Zhang*, Yaowei
Zhang, Hongming Xu,
Peiyuan Zhi,
Qing Li,
Siyuan Huang
ICRA 2025 Paper / Project We introduce SYNERGAI, a unified system designed to achieve both perceptual
alignment and human-robot collaboration.
ArtGS: Building Interactable Replicas of Complex Articulated Objects via
Gaussian Splatting Yu Liu*,
Baoxiong Jia*,
Ruijie Lu,
Song-Chun Zhu,
Siyuan Huang
ICLR 2025 Paper / Project We introduce ArtGS, a novel approach that leverages 3D Gaussians as a
flexible
and efficient representation to reconstruct articulated objects.
PhyRecon: Physically Plausible Neural Scene Reconstruction Junfeng
Ni*,
Yixin Chen*, Bohan
Jing,
Nan Jiang,
Bin Wang,
Bo Dai,
Puhao Li,
Yixin Zhu,
Song-Chun Zhu,
Siyuan Huang
NeurIPS 2024 Paper / Project / Code We introduce PhyRecon, the first approach to leverage both differentiable
rendering and differentiable physics simulation to learn implicit surface
representations for neural scene reconstruction.
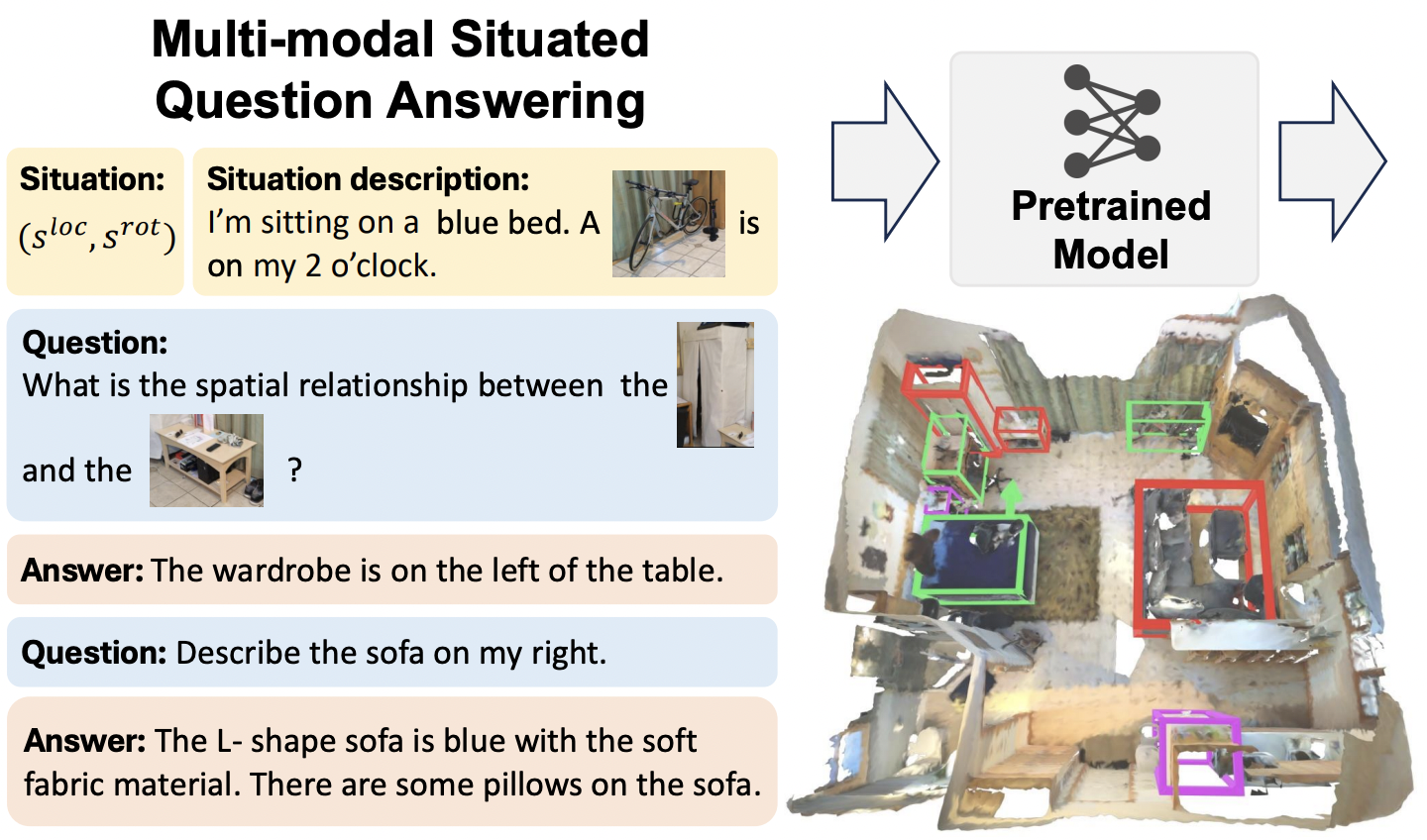
Multi-modal Situated Reasoning in 3D Scenes Xiongkun Linghu*,
Jiangyong
Huang*,
Xuesong Niu,
Xiaojian Ma,
Baoxiong
Jia†,
Siyuan Huang†
NeurIPS 2024 (Dataset and Benchmark Track) Paper / Project / Code We propose Multi-modal Situated Question Answering (MSQA), a large-scale
multi-modal situated reasoning dataset, scalably collected leveraging 3D scene
graphs
and vision-language models (VLMs) across a diverse range of real-world 3D scenes.
Autonomous Character-Scene Interaction Synthesis from Text Instruction
Nan Jiang*,
Zimo He*,
Zi Wang,
Hongjie Li,
Yixin Chen,
Tengyu Liu,
Siyuan Huang †,
Yixin Zhu†,
SIGGRAPH Asia 2024 Paper / Project We propose the first unified model for autonomous character-scene
interaction
synthesis from text instruction.
SlotLifter: Slot-guided Feature Lifting for Learning Object-centric Radiance
Fields Yu Liu*,
Baoxiong Jia*,
Yixin Chen,
Siyuan Huang
ECCV 2024 Paper / Project We propose SlotLifter, a novel object-centric radiance model addressing
scene
reconstruction and decomposition jointly via slot-guided feature lifting.
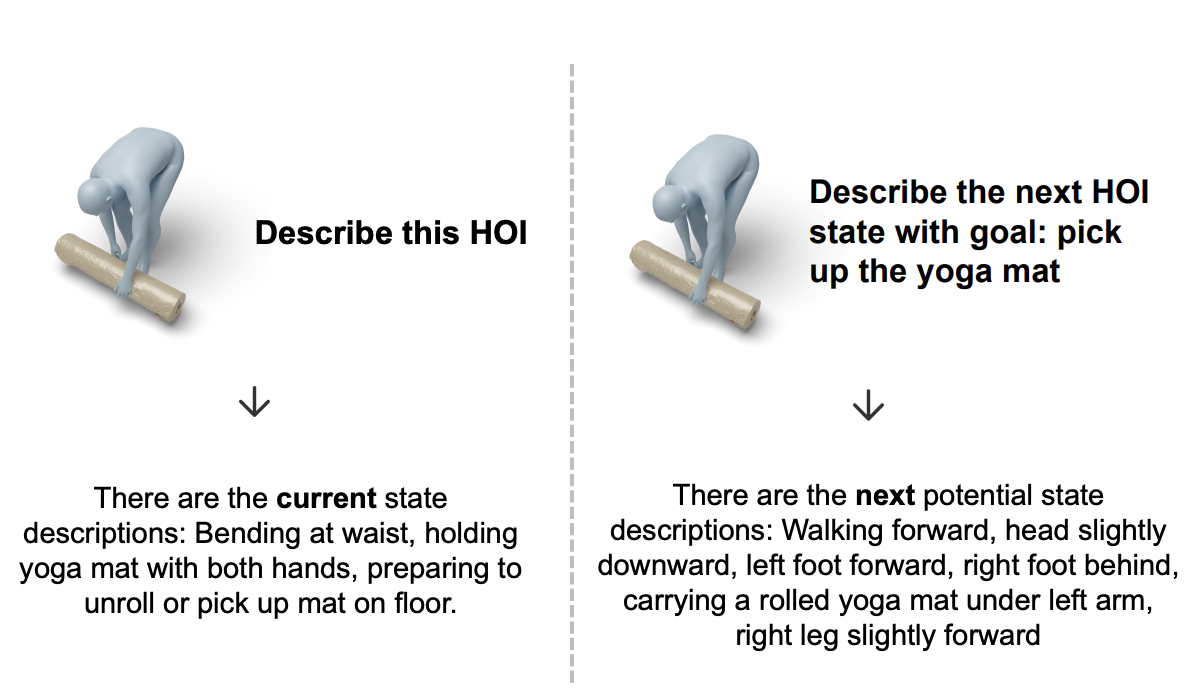
F-HOI: Toward Fine-grained Semantic-Aligned 3D Human-Object Interactions
Jie Yang*,
Xuesong Niu*,
Nan Jiang*,
Ruimao
Zhang†,
Siyuan Huang†,
ECCV 2024 Paper / Project We propose a unified model called F-HOI, designed to leverage multimodal
instructions and empower the Multi-modal Large Language Model to efficiently handle
diverse HOI tasks.
PHYSCENE: Physically Interactable 3D Scene Synthesis for Embodied AI
Yandan Yang*,
Baoxiong Jia*,
Peiyuan Zhi,
Siyuan Huang
CVPR 2024 Highlight, 2.8% Paper / Project We introduce PhyScene, a novel method dedicated to generating interactive 3D
scenes characterized by realistic layouts, articulated objects, and rich physical
interactivity tailored for embodied agents.
Move as You Say, Interact as You Can:
Language-guided Human Motion Generation with Scene Affordance Zan Wang,
Yixin Chen,
Baoxiong Jia,
Puhao Li,
Jinlu Zhang, Jinze
Zhang,
Tengyu Liu,
Yixin Zhu†,
Wei
Liang†,
Siyuan Huang†
CVPR 2024 Highlight, 2.8% Paper / Project / Code We introduce a novel two-stage framework that employs scene affordance as an
intermediate representation, effectively linking 3D scene grounding and conditional
motion generation.
Scaling Up Dynamic Human-Scene Interaction Modeling Nan Jiang*, Zhiyuan
Zhang*, Hongjie
Li, Xiaoxuan
Ma,
Zan Wang,
Yixin Chen,
Tengyu Liu,
Yixin Zhu†,
Siyuan Huang †
CVPR 2024 Highlight, 2.8% Paper / Project / Live Demo / Code We introduce the TRUMANS dataset as the most comprehensive motion-captured
HSI
dataset currently available, encompassing over 15 hours of human interactions across
100
indoor scenes. We also present the first model that scales up human-scene
interaction
modeling and achieves remarkable performance in generation.
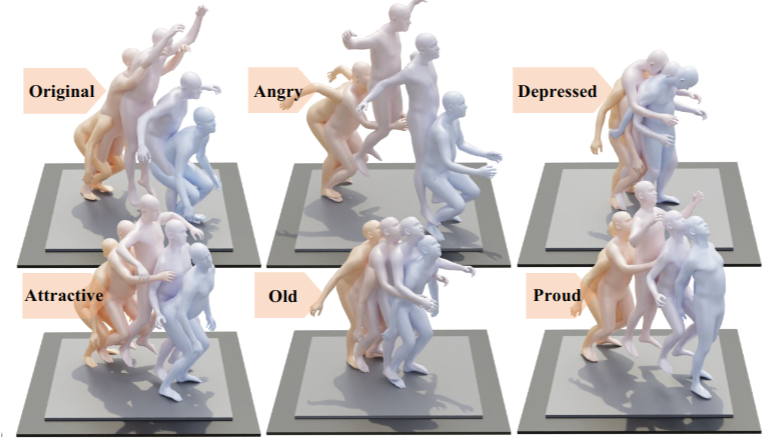
AnySkill: Learning Open-Vocabulary Physical Skill for Interactive Agents
Jiemin Cui*,
Tengyu Liu*,
Nian Liu*,
Yaodong Yang,
Yixin Zhu†,
Siyuan Huang†
CVPR 2024 Paper / Project / Code We propose AnySkill, a novel hierarchical method that learns physically
plausible interactions following open-vocabulary instructions. AnySkill is the first
method capable of open-vocabulary physical skill learning for interactive humanoid
agents.
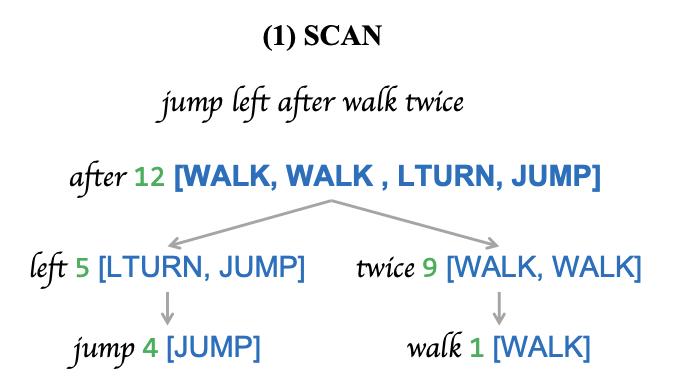
Neural-Symbolic Recursive Machine for Systematic Generalization Qing Li,
Yixin Zhu,
Yitao Liang,
Ying Nian Wu,
Song-Chun Zhu,
Siyuan Huang
ICLR 2024 Paper We propose Neural-Symbolic Recursive Machine (NSR) for learning
compositional
rules from limited data and applying them to unseen combinations in various domains.
NSR
achieves 100% generalization accuracy on SCAN and
PCFG and outperforms state-of-the-art models on HINT by about 23%.
Single-view 3D Scene Reconstruction with High-fidelity Shape and Texture
Yixin Chen*,
Junfeng
Ni*,
Nan Jiang, Yaowei
Zhang,
Yixin Zhu,
Siyuan Huang
3DV 2024 Paper /
Project /
Code We propose a novel framework for simultaneous high-fidelity recovery of
object shapes and textures from single-view images.
ARNOLD: A Benchmark for Language-Grounded Task Learning with Continuous
States
in Realistic Scenes Ran Gong*,
Jiangyong
Huang*,
Yizhou
Zhao,
Haoran
Geng,
Xiaofeng Gao,
Qingyang Wu,
Wensi Ai,
Ziheng
Zhou,
Demetri
Terzopoulos,
Song-Chun Zhu,
Baoxiong Jia,
Siyuan Huang
ICCV 2023
CoRL 2022 Workshop on Language and Robot Learning Spotlight Presentation Arxiv / Project / Code We present ARNOLD, a
benchmark that evaluates language-grounded task learning with continuous states
in realistic 3D scenes. ARNOLD consists of 8 language-conditioned tasks that
involve understanding object states and learning policies for continuous goals.
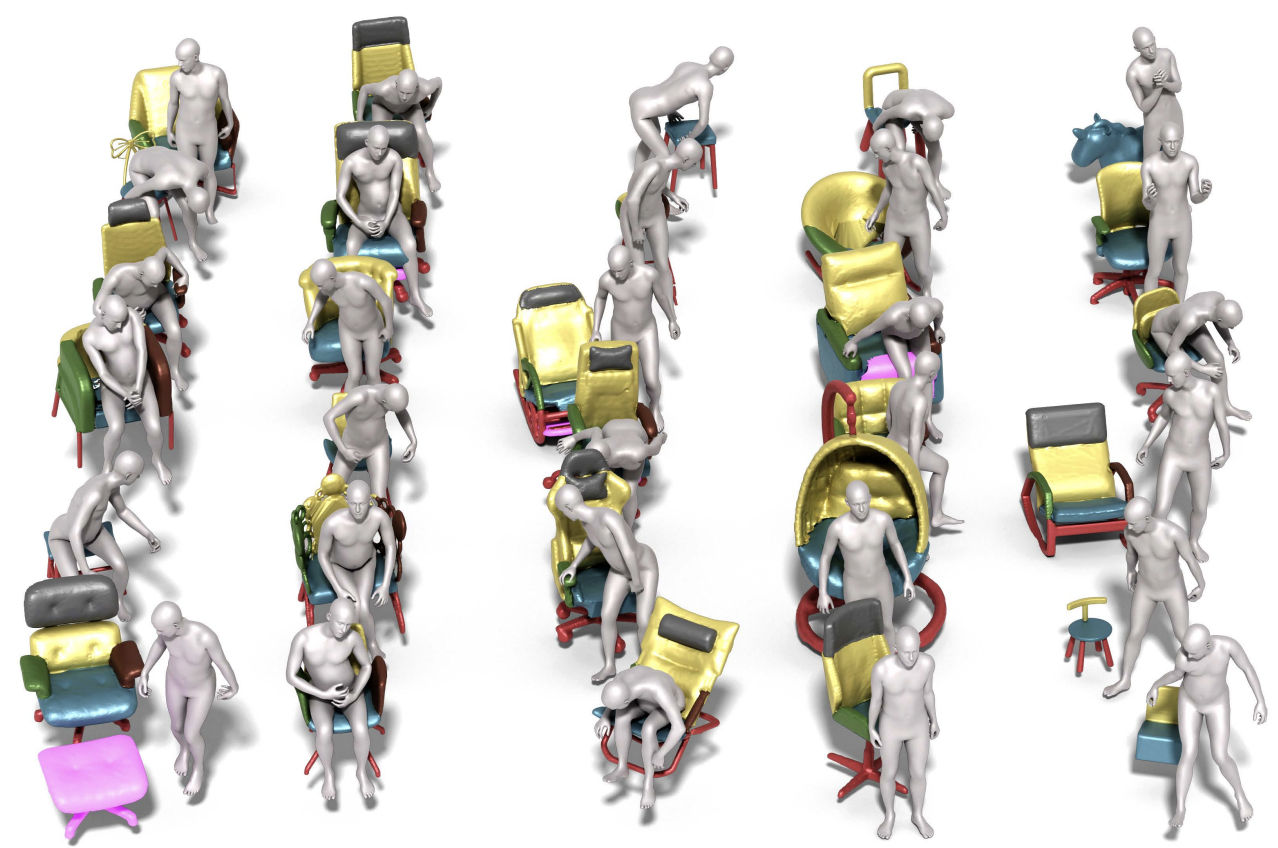
Full-Body Articulated Human-Object Interaction Nan Jiang*,
Tengyu Liu*,
Zhexuan Cao,
Jieming Cui,
Zhiyuan Zhang,
He Wang,
Yixin Zhu†,
Siyuan Huang†
ICCV 2023 Paper / Project / Code We present CHAIRS, a large-scale motion-captured f-AHOI dataset, consisting
of
16.2 hours of versatile interactions between 46 participants and 74 articulated and
rigid sittable objects. CHAIRS provides 3D meshes of both humans and articulated
objects
during the entire interactive process, as well as realistic and physically plausible
full-body interactions.
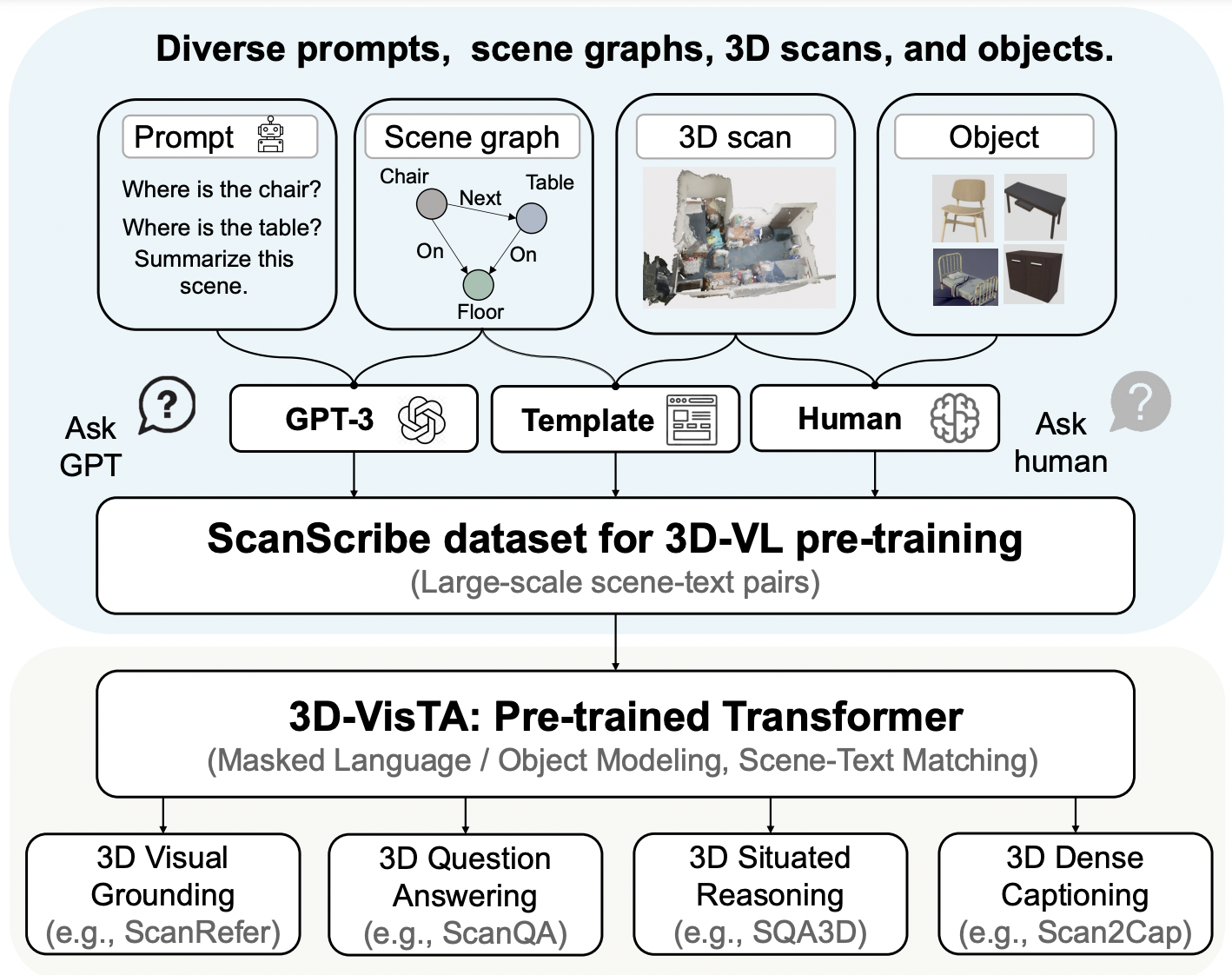
3D-VISTA: Pre-trained Transformer for 3D Vision and Text Alignment
Ziyu Zhu,
Xiaojian Ma,
Yixin Chen, Zhidong
Deng,
Siyuan Huang†,
Qing Li
†
ICCV 2023 Paper / Project / Code We propose 3D-VisTA, a foundation model that can be easily adapted to
various 3D vision-language tasks.
Diffusion-based Generation, Optimization, and Planning in 3D Scenes
Siyuan Huang*,
Zan Wang*,
Puhao Li,
Baoxiong Jia,
Tengyu Liu,
Yixin Zhu,
Wei Liang,
Song-Chun Zhu
CVPR 2023 Paper / Project / Code We introduce SceneDiffuser, a conditional generative model for 3D scene
understanding. SceneDiffuser provides a unified model for solving
scene-conditioned
generation, optimization, and planning. In contrast to prior work, SceneDiffuser
is
intrinsically scene-aware, physics-based, and goal-oriented.
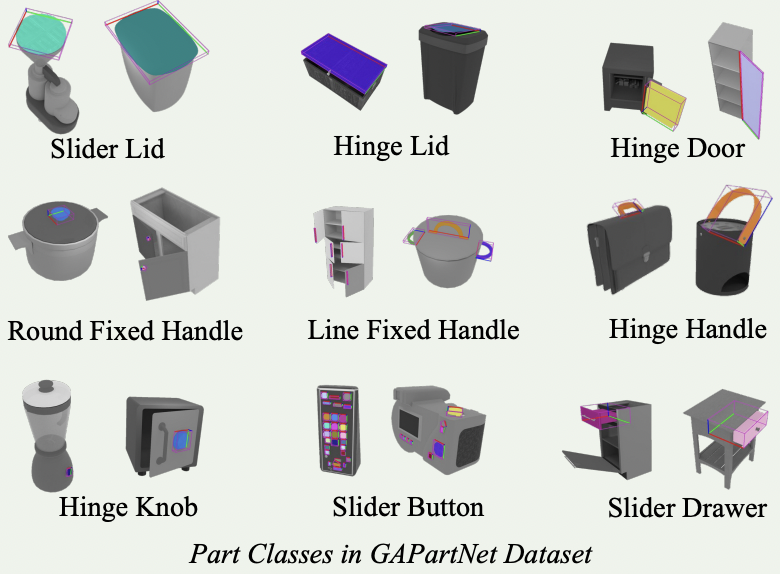
GAPartNet: Learning Generalizable and Actionable Parts for Cross-Category
Object
Perception and Manipulation Haoran Geng*,
Helin
Xu*, Chengyang
Zhao*,
Chao Xu,
Li Yi,
Siyuan Huang,
He Wang
CVPR 2023 Highlight, 2.5% Paper / Project / Code We propose to learn generalizable object perception and manipulation
skills
via Generalizable and Actionable Parts,
and present GAPartNet, a large-scale interactive dataset with rich part
annotations.
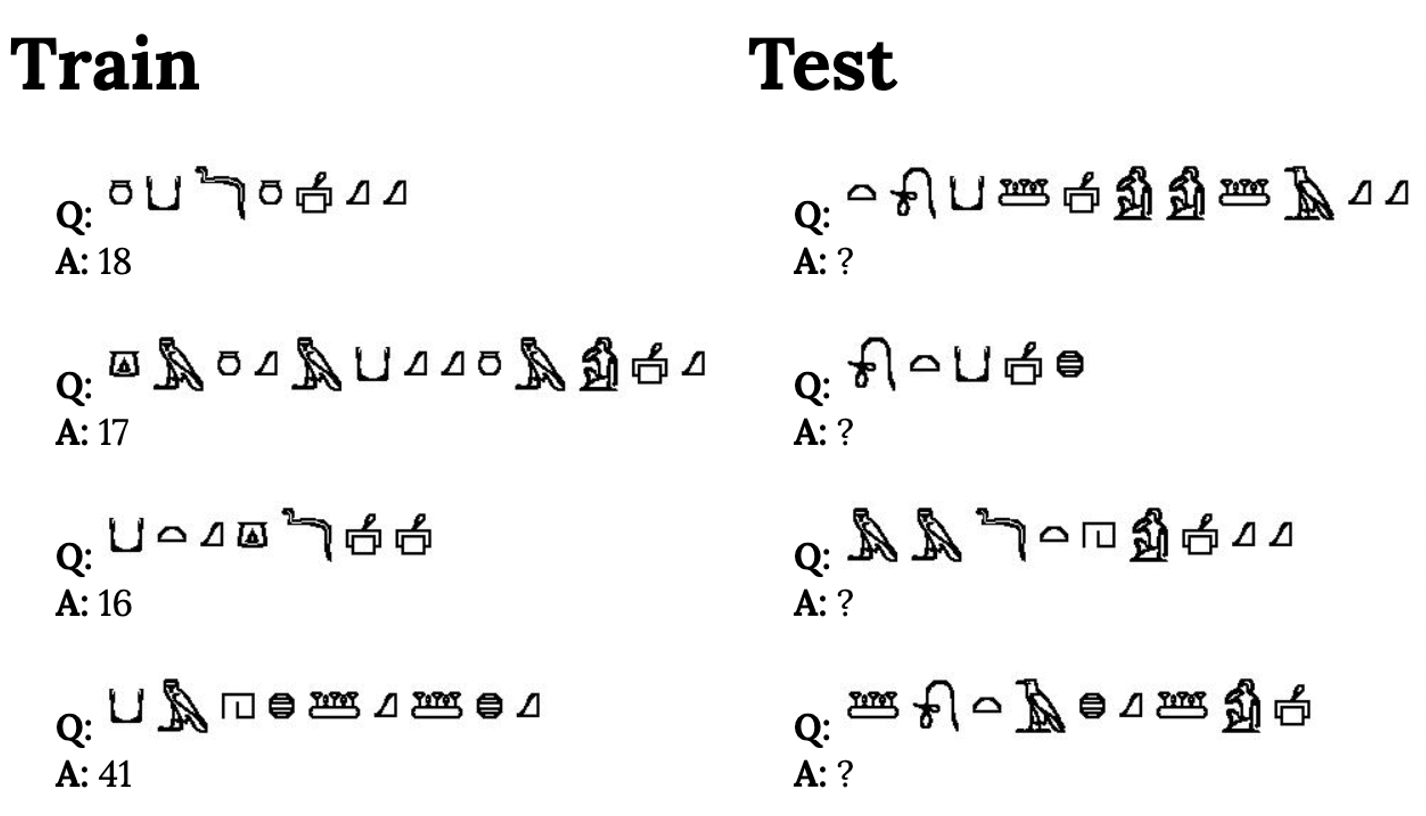
A Minimalist Dataset for Systematic Generalization of Perception, Syntax,
and
Semantics Qing Li,
Siyuan Huang,
Yining Hong,
Yixin Zhu,
Ying Nian Wu,
Song-Chun Zhu
ICLR 2023 Spotlight, 5.7% Paper we present a new dataset, HINT, to study machines' capability of learning
generalizable concepts at three different levels: perception, syntax, and semantics.
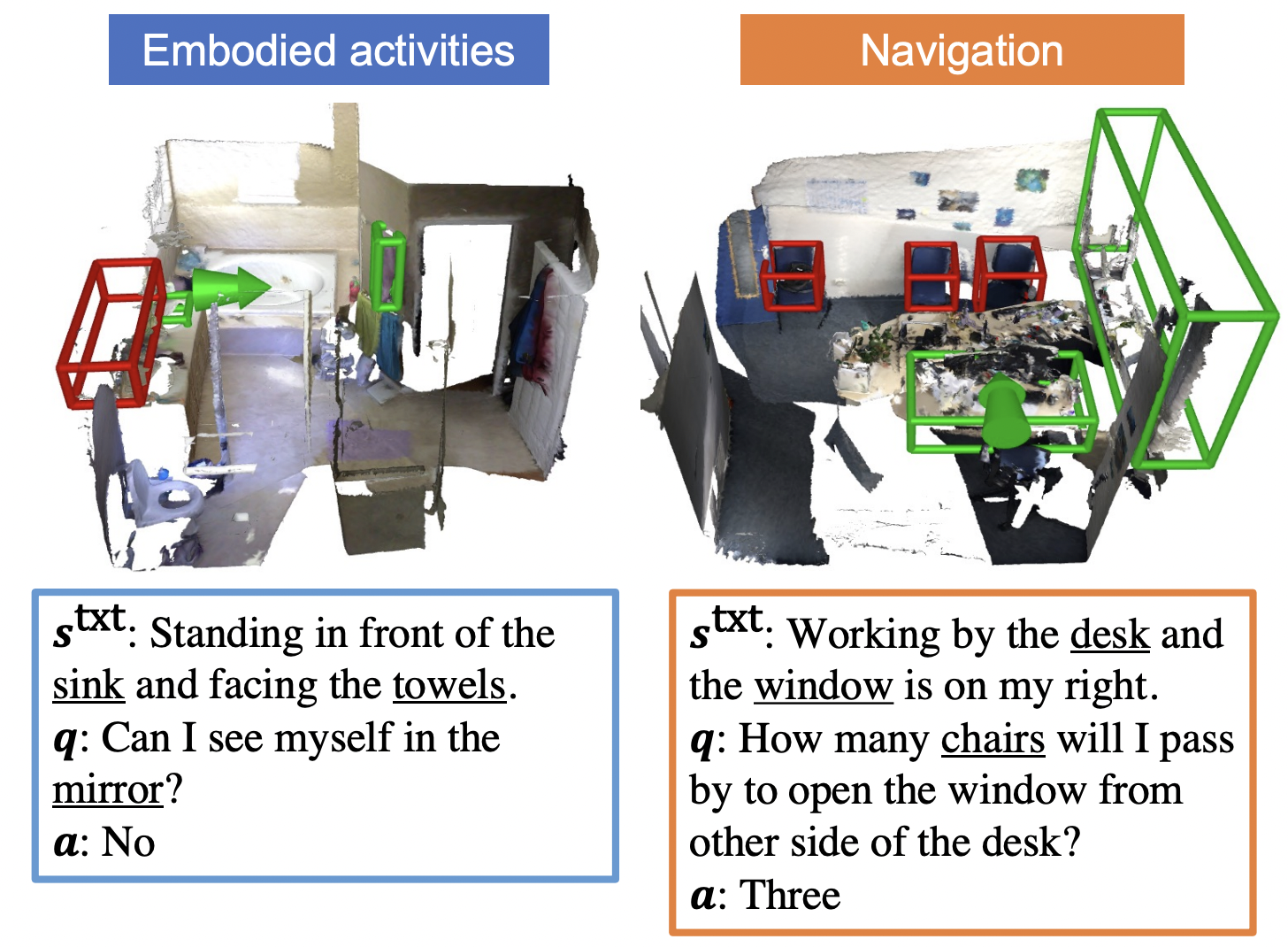
SQA3D: Situated Question Answering in 3D Scenes Xiaojian Ma,
Silong Yong,
Zilong Zheng,
Qing Li ,
Yitao Liang,
Song-Chun Zhu,
Siyuan Huang
ICLR 2023 Paper / Project / Code / Slides We propose a new task to benchmark scene understanding of
embodied
agents: Situated Question Answering in 3D Scenes (SQA3D). Given a scene
context (e.g., 3D scan), SQA3D requires the tested agent to first
understand
its situation (position, orientation, etc.) in the 3D scene as described
by
text, then reason about its surrounding environment and answer a
question
under that situation.
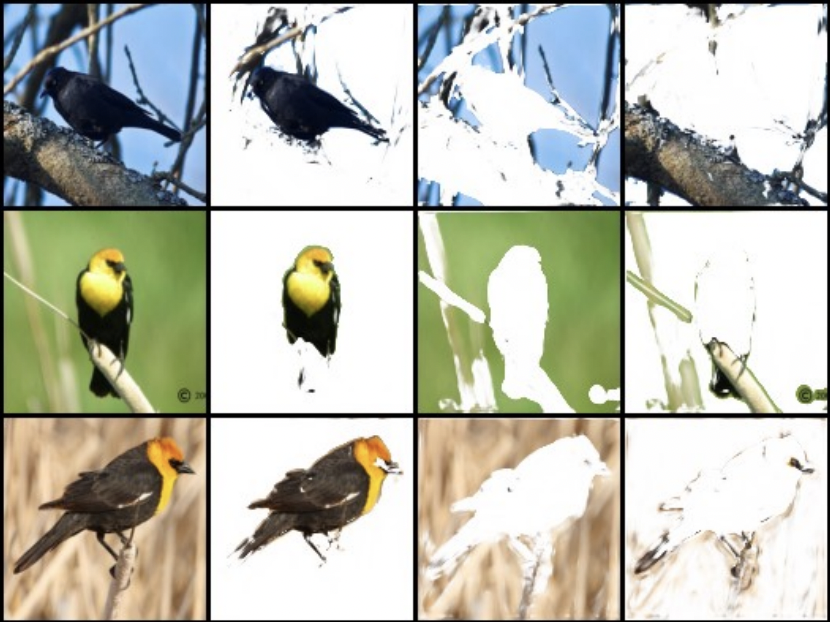
Improving Object-centric Learning with Query Optimization Baoxiong Jia*,
Yu Liu*,
Siyuan Huang
ICLR 2023 Paper / Project / Code Our model, Bi-level Optimized Query Slot Attention, achieves
state-of-the-art
results on 3 challenging synthetic and 7 complex real-world datasets in unsupervised
image segmentation and reconstruction, outperforming previous baselines by a
large margin.
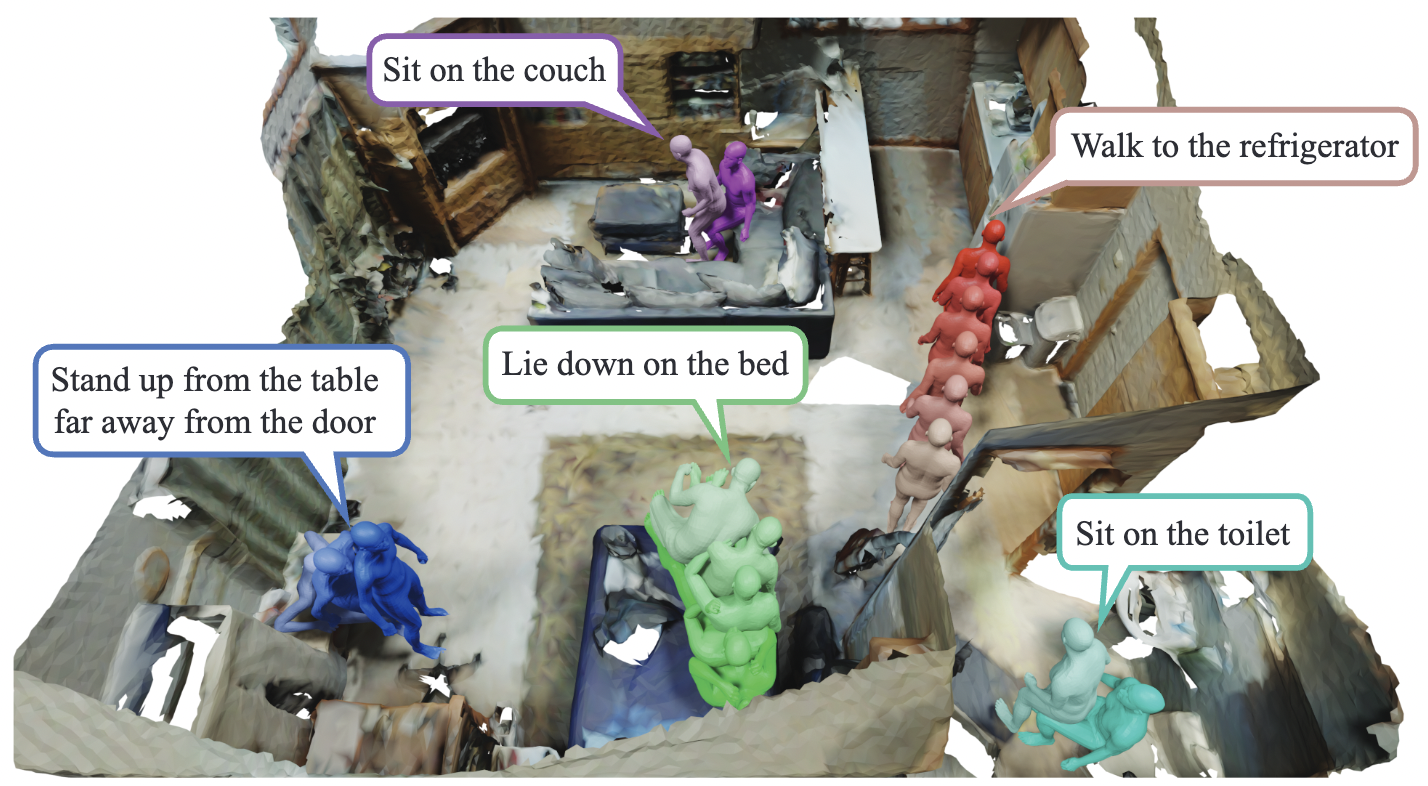
HUMANISE: Language-conditioned Human Motion Generation in 3D Scenes
Zan Wang,
Yixin Chen,
Tengyu Liu,
Yixin Zhu,
Wei Liang,
Siyuan Huang
NeurIPS 2022 Paper / Project / Code We present a novel scene-and-language conditioned generative model that can
produce 3D human motions of the desirable action interacting with the specified
objects.
For example, sit on the armchair near the desk.To fill in the gap. We collect a
large-scale and semantic-rich synthetic human-scene interaction dataset, denoted as
HUMANISE, to enable such langauge-conditoned scene understanding tasks.
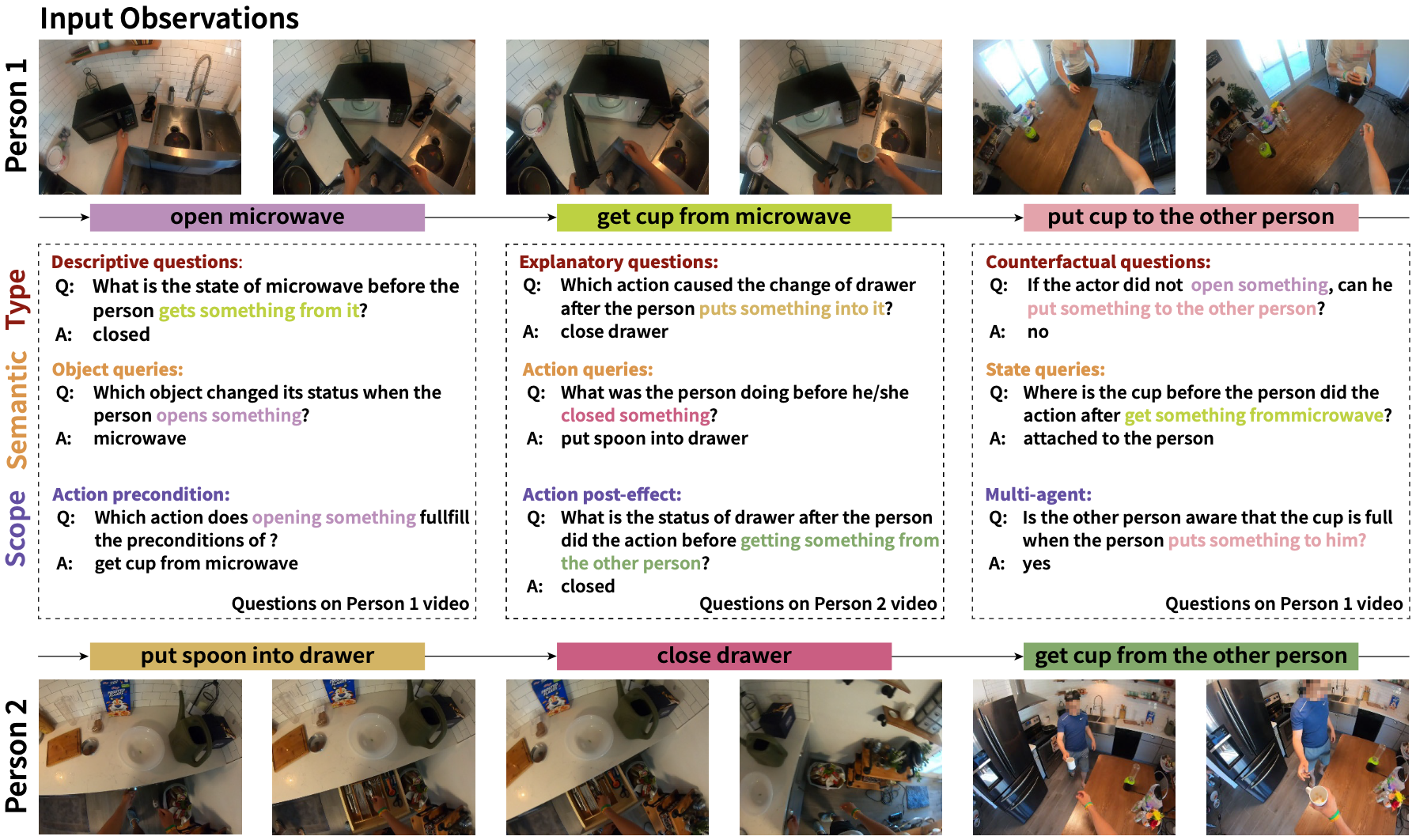
EgoTaskQA: Understanding Human Tasks in Egocentric Videos Baoxiong Jia ,
Ting Lei,
Song-Chun Zhu,
Siyuan Huang
NeurIPS 2022 (Dataset and Benchmark Track) Paper / Project / Code We introduce the EgoTaskQA benchmark that
provides a single home for the crucial dimensions of task understanding through
question answering on real-world egocentric videos. We meticulously design
questions that target the understanding of (1) action dependencies and effects,
(2) intents and goals, and (3) agents' beliefs about others.
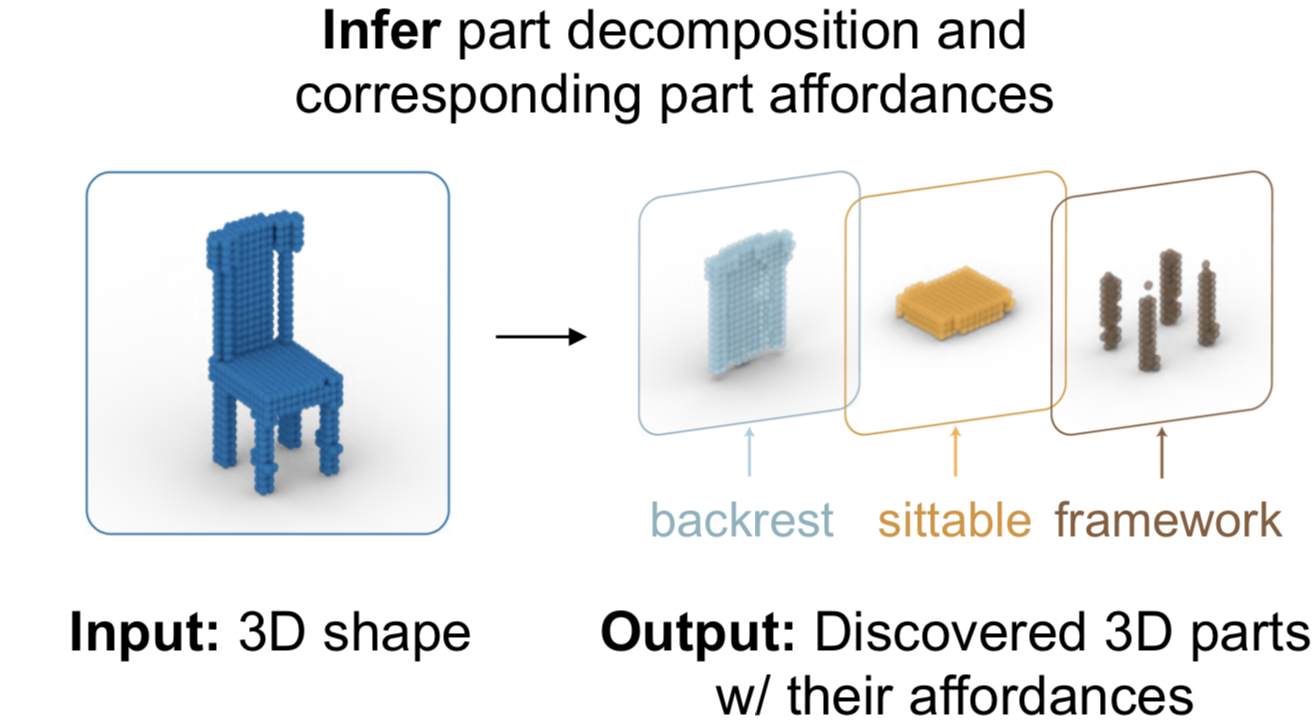
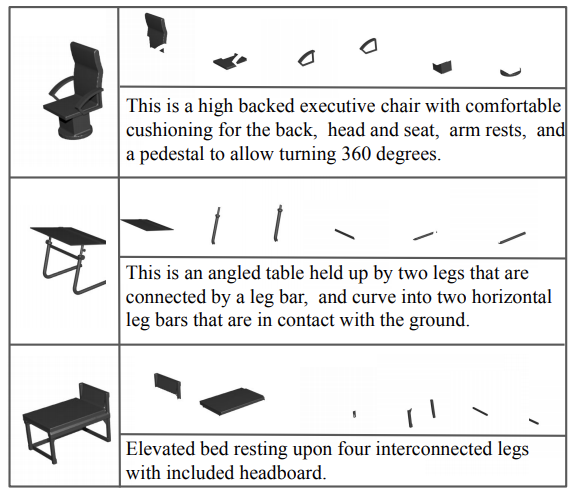
PartAfford: Part-level Affordance Discovery from 3D Objects Chao Xu ,
Yixin Chen,
He Wang,
Song-Chun Zhu,
Yixin Zhu,
Siyuan Huang
ECCV 2022 Visual Object-oriented Learning
meets Interaction (VOLI) Workshop Paper We present a new task of part-level affordance discovery (PartAfford): Given
only the affordance labels per object, the machine is tasked to (i) decompose 3D
shapes
into parts and (ii) discover how each part of the object corresponds to a certain
affordance category.
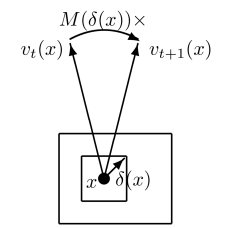
Learning V1 simple cells with vector representations of local contents and
matrix representations of local motions Ruiqi Gao ,
Jianwen Xie ,
Siyuan Huang,
Yufan Ren,
Song-Chun Zhu,
Ying Nian Wu
AAAI 2022 Paper We propose a representational model that couples the vector representations
of
local image contents with the matrix representations of local pixel displacements.
When
the image changes from one time frame to the next due to pixel displacements, the
vector
at each pixel is rotated by a matrix that represents the displacement of this pixel.
VLGrammar: Grounded Grammar Induction of Vision and Language
Yining Hong,
Qing Li,
Song-Chun Zhu,
Siyuan Huang
ICCV 2021 Paper /
Supplementary /
Code We study grounded grammar induction of vision and language in a joint
learning
framework.
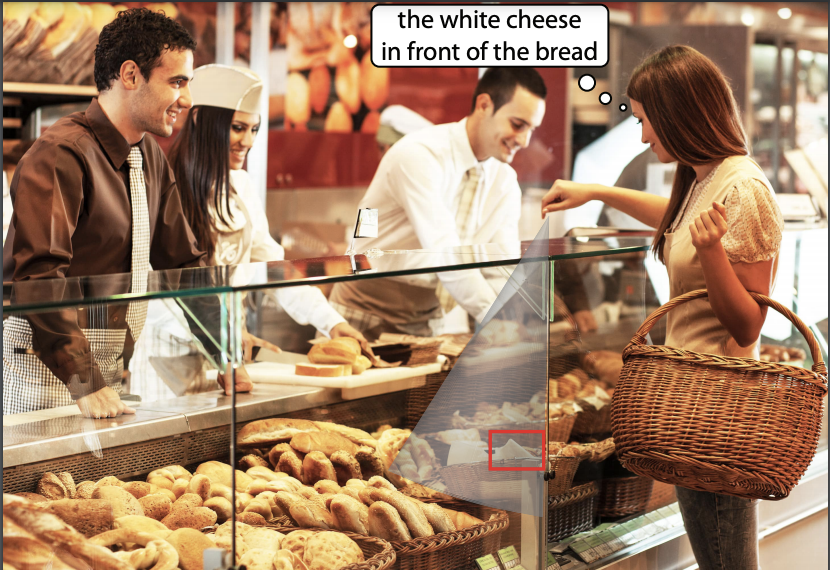
YouRefIt: Embodied Reference Understanding with Language and Gesture
Yixin Chen,
Qing Li, Deqian
Kong, Yik Lun Kei,
Tao Gao ,
Yixin Zhu,
Song-Chun Zhu,
Siyuan Huang
ICCV 2021 Oral Presentation Paper /
Supplementary /
Project /
Code We study the machine's understanding of embodied reference: One agent uses
both
language and gesture to refer to an object to another agent in a shared physical
environment.
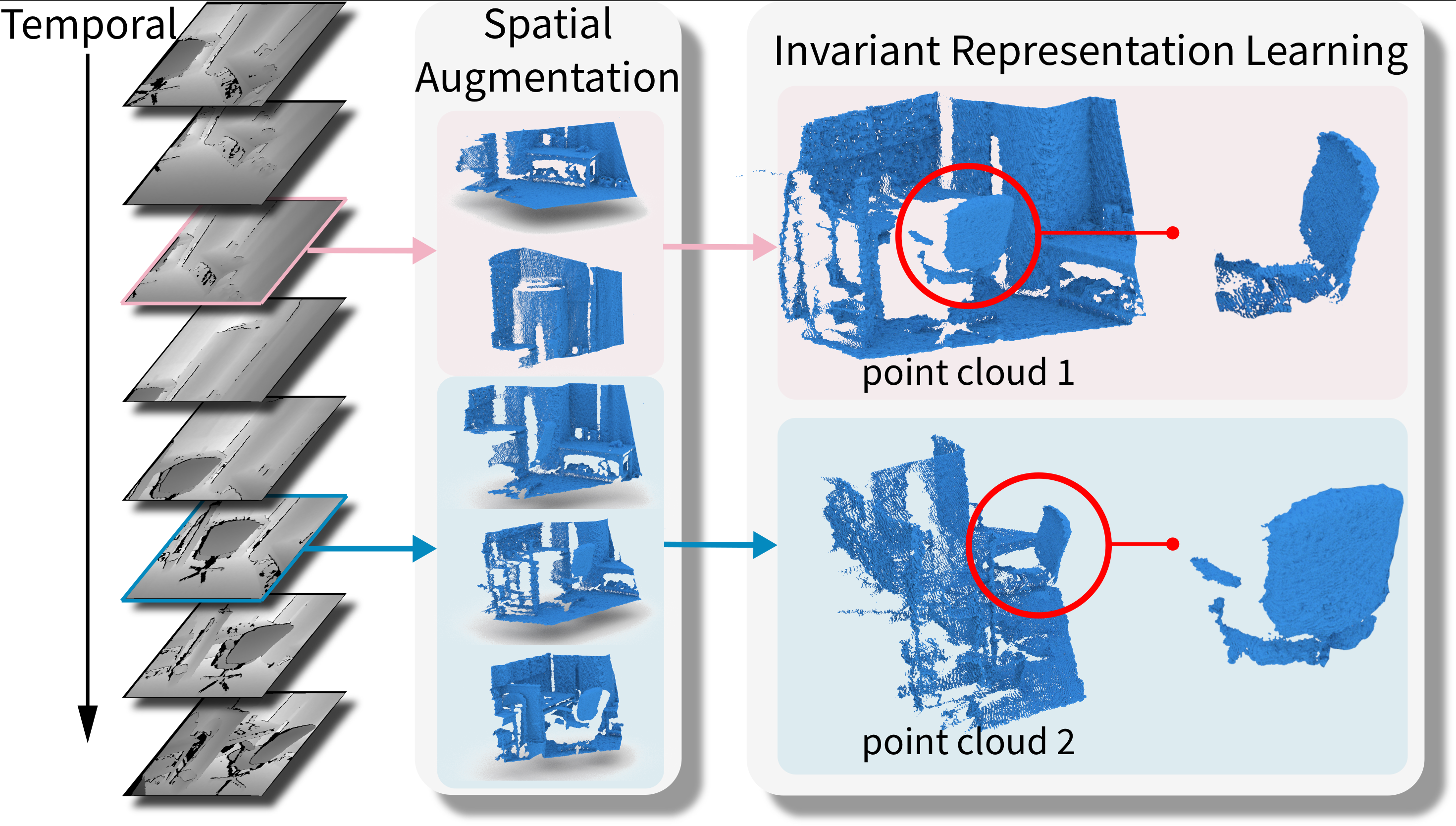
Spatio-temporal Self-Supervised Representation Learning for 3D Point Clouds
Siyuan Huang*,
Yichen Xie*Song-Chun Zhu,
Yixin Zhu
ICCV 2021 Paper /
Supplementary /
Project /
Code We introduce a spatio-temporal representation
learning (STRL) framework, capable of learning from unlabeled 3D point clouds in a
self-supervised fashion.
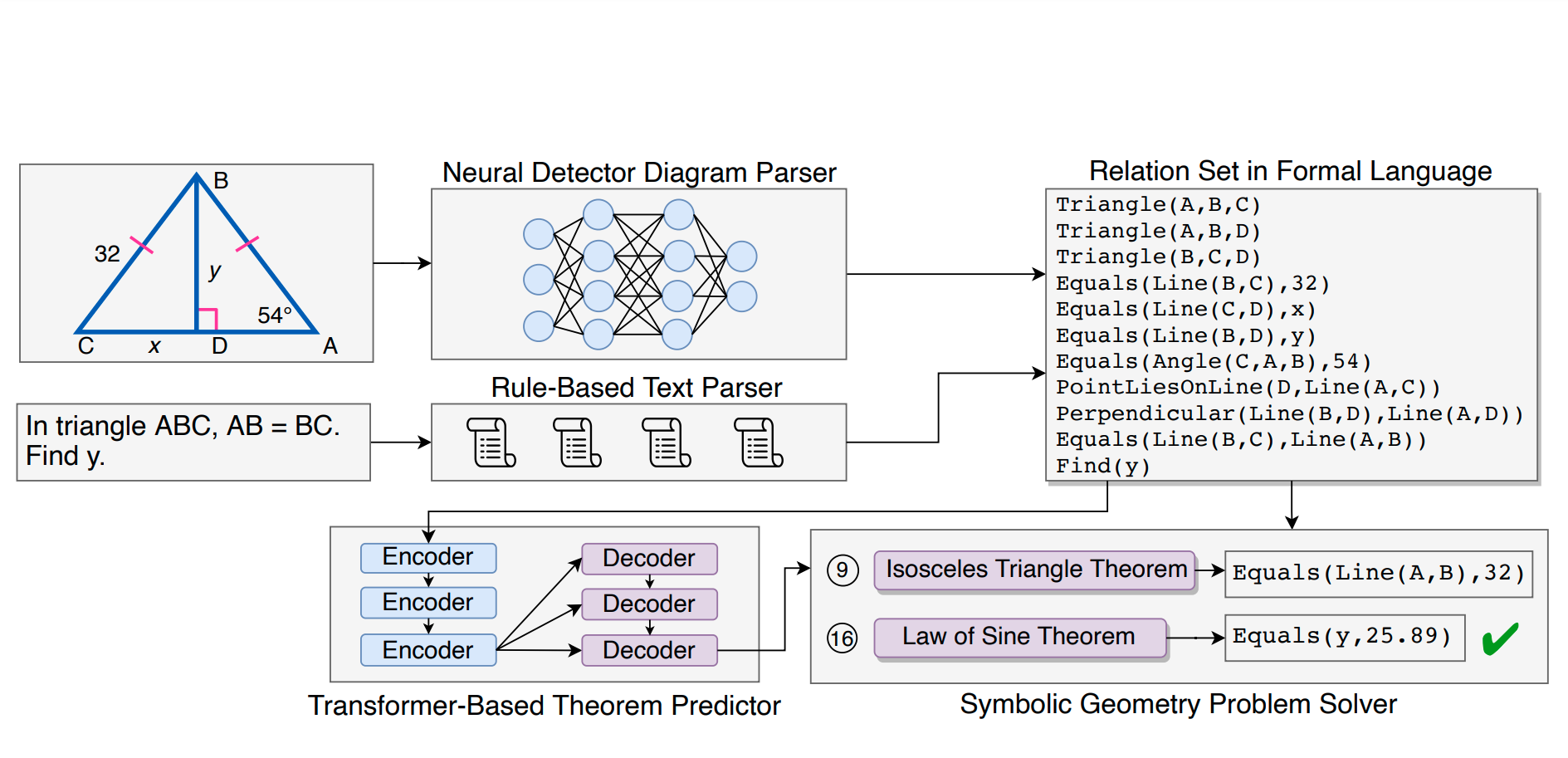
Inter-GPS: Interpretable Geometry Problem Solving with Formal Language and
Symbolic Reasoning
Pan Lu*, Ran Gong*, Shibiao Jiang*, Liang Qiu, Siyuan Huang, Xiaodan
Liang,
Song-Chun Zhu
ACL 2021 Oral Presentation Paper /
Code /
Project /
Bibtex We construct a new largescale benchmarkconsisting of 3,002 geometry problems
with dense annotation in formal language and propose a novel geometry solving
approach
with formal language and symbolic reasoning.
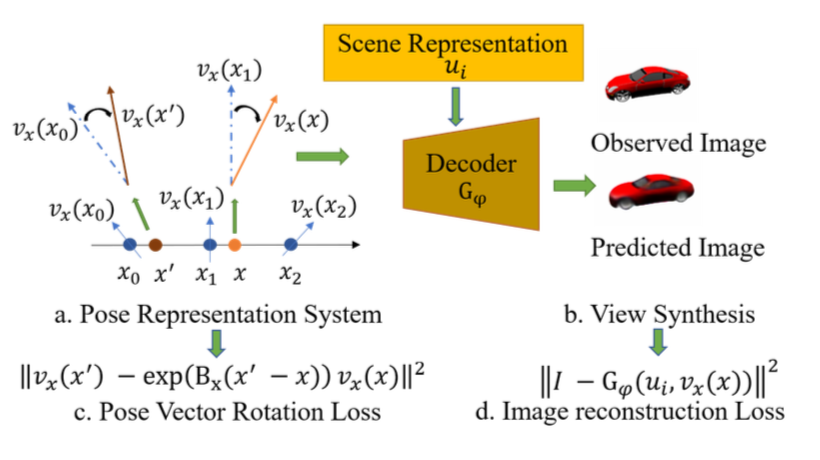
Learning Neural Representation of Camera Pose with Matrix Representation of
Pose
Shift via View Synthesis
Yaxuan Zhu,
Ruiqi Gao,
Siyuan Huang,
Song-Chun Zhu,
Ying Nian Wu
CVPR 2021 Oral Presentation Paper /
Supplementary /
Code To efficiently represent camera pose in 3D computer vision, we propose an
approach to learn neural representations of camera poses and 3D scenes, coupled with
neural representations of local camera movements.
SMART: A Situation Model for Algebra Story Problems via Attributed Grammar
Yining Hong,
Qing Li,
Ran Gong,
Daniel Ciao,
Siyuan Huang,
Song-Chun Zhu
AAAI 2021 Paper /
Project /
Bibtex We propose SMART, which adopts attributed grammar as the representation of
situation models for solving the algebra story problems.
Learning by Fixing: Solving Math Word Problems with Weak Supervision
Yining Hong,
Qing Li,
Daniel Ciao,
Siyuan Huang,
Song-Chun Zhu
AAAI 2021 Paper /
Supplementary /
Code /
Project /
Bibtex We introduce a weakly-supervised paradigm for learning math word problems.
Our
method only requires the annotations of the final answers and can generate various
solutions for a single problem.
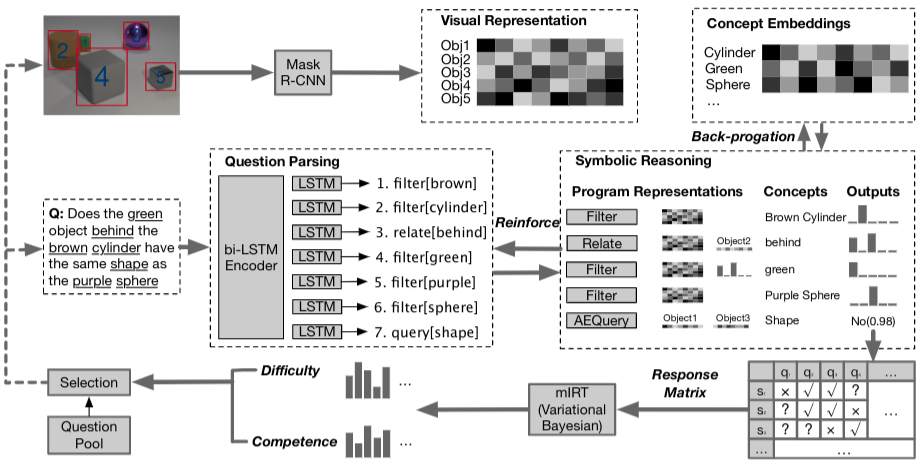
A Competence-aware Curriculum for Visual Concepts Learning via Question
Answering Qing Li ,
Siyuan Huang,
Yining Hong,
Song-Chun Zhu
ECCV 2020 Oral Presentation Paper We design a neural-symbolic concept learner for learning the visual concepts
and
a multi-dimensional Item Response Theory (mIRT) model for guiding the visual concept
learning process with an adaptive curriculum.
LEMMA: A Multi-view Dataset for Learning Multi-agent Multi-task Activities
Baoxiong
Jia,
Yixin Chen,
Siyuan Huang,
Yixin Zhu,
Song-Chun Zhu
ECCV 2020 Paper /
Code /
Project /
Bibtex We introduce the LEMMA dataset to provide a single home to address these
missing
dimensions with carefully designed settings, wherein the numbers of tasks and agents
vary to highlight different learning objectives. We densely annotate the
atomic-actions
with human-object interactions to provide ground-truth of the compositionality,
scheduling, and assignment of daily activities.
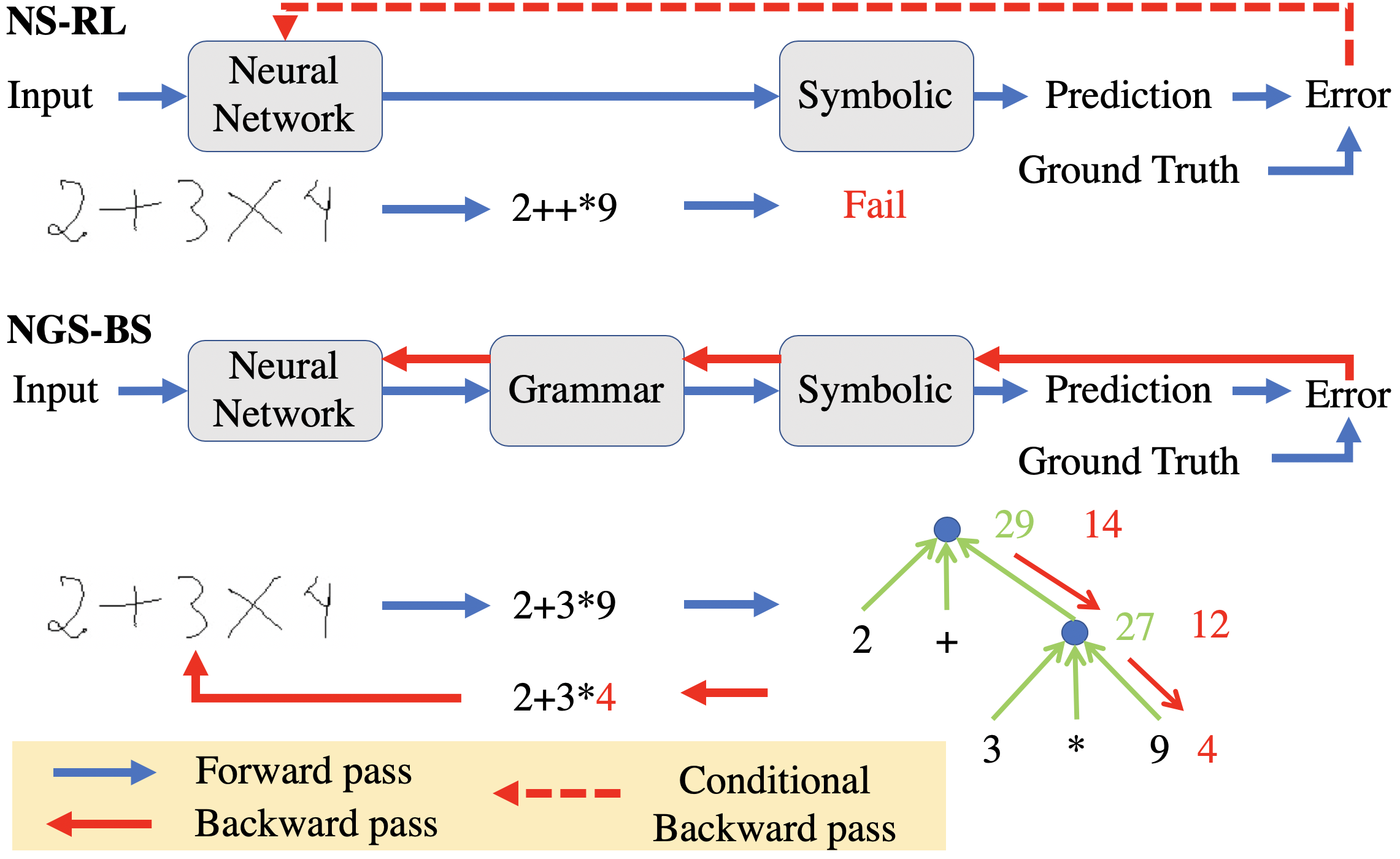
Closed Loop Neural-Symbolic Learning via Integrating Neural Perception,
Grammar
Parsing, and Symbolic Reasoning Qing Li ,
Siyuan Huang,
Yining Hong,
Yixin Chen,
Ying Nian Wu,
Song-Chun Zhu
ICML 2020 Best Paper Award at Workshop on Bridge Between Perception and
Reasoning:
Graph Neural Networks & Beyond. Paper /
Supplementary /
Code /
Project /
Bibtex We close the loop of neural-symbolic learning by introducing the
grammar}model
as a symbolic prior to bridge neural perception and symbolic reasoning, and
proposing a
novel back-search algorithm which mimics the top-down human-like learning procedure
to
propagate the error through the symbolic reasoning module efficiently.
Dark, Beyond Deep: A Paradigm Shift to Cognitive AI with Humanlike Common
Sense
Yixin Zhu,
Tao Gao,
Lifeng
Fan,
Siyuan Huang,
Edmonds Mark,
Hangxin Liu,
Feng Gao,
Chi Zhang,
Siyuan Qi,
Ying Nian Wu,
Josh
Tenenbaum,
Song-Chun Zhu
Engineering 2020 Paper We demonstrate the power of this perspective to develop cognitive AI systems
with humanlike common sense by showing how to
observe and apply FPICU with little training data to solve a wide range of
challenging
tasks, including tool use, planning, utility
inference, and social learning.
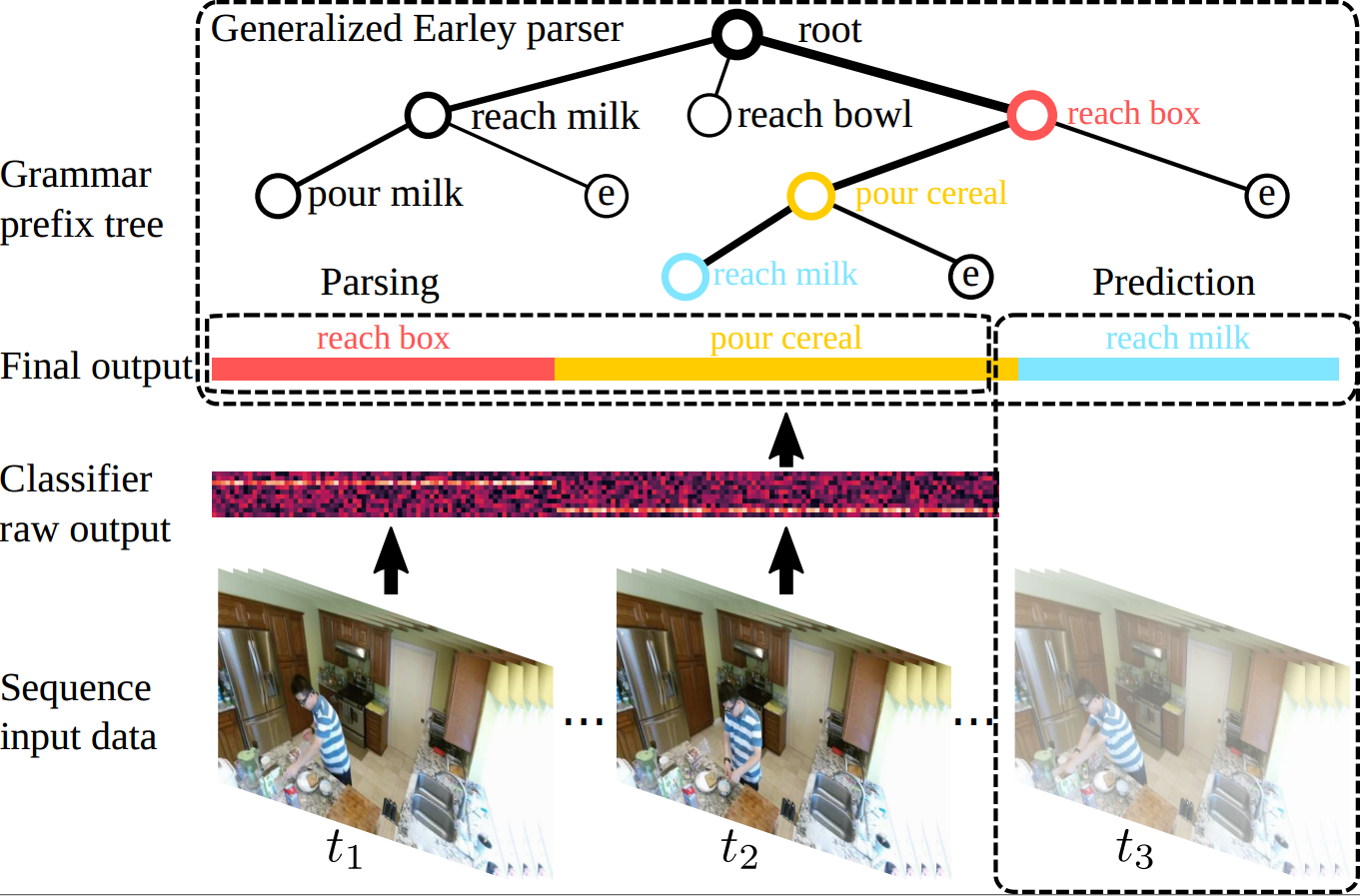
A Generalized Earley Parser for Human Activity Parsing and Prediction
Siyuan Qi ,
Baoxiong
Jia ,
Siyuan Huang,
Ping Wei,
Song-Chun Zhu
TPAMI 2020 Paper Propose an algorithm to tackle the task of understanding complex human
activities from (partially observed) videos from two important aspects: activity
recognition and prediction.
PerspectiveNet: 3D Object Detection from a Single RGB Image via Perspective
Points Siyuan Huang,
Yixin Chen,
Tao Yuan,
Siyuan Qi,
Yixin Zhu,
Song-Chun Zhu
Neural Information Processing Systems (NeurIPS) 2019 Paper To solve the problem of 3D object detection, we propose perspective points
as a
novel intermediate representation, defined as the 2D projections of
locally-Manhattan 3D
keypoints to locate an object, and they satisfy certain geometric constraints caused
by
the perspective projection.
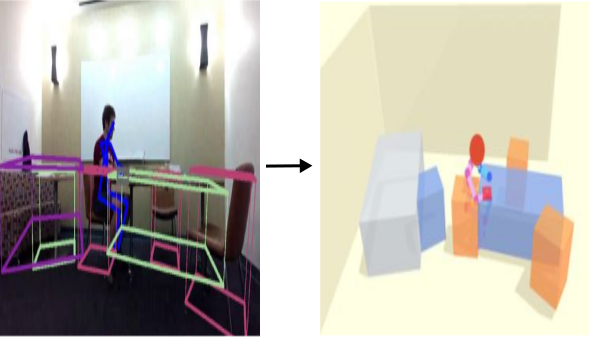
Holistic++ Scene Understanding: Single-view 3D Holistic Scene Parsing and
Human
Pose Estimation with Human-Object Interaction and Physical Commonsense Yixin Chen *,
Siyuan Huang *,
Tao Yuan,
Siyuan Qi,
Yixin Zhu,
Song-Chun Zhu
IEEE International Conference on Computer Vision (ICCV) 2019
* Equal contributions Paper /
Supplementary /
Project Propose a new 3D holistic++ scene understanding problem, which jointly
tackles
two tasks from a single-view image: (i) holistic scene parsing and reconstruction-
and
(ii) 3D human pose estimation. We incorporate the human-object interaction (HOI) and
physical commonsense to tackle this problem.
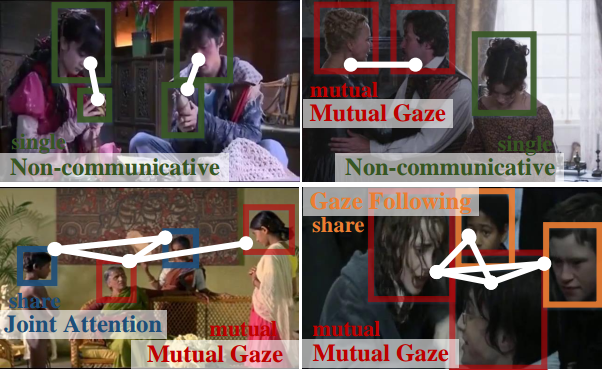
Understanding Human Gaze Communication by Spatio-Temporal Graph Reasoning
Lifeng Fan
*,
Wenguan
Wang *,
Siyuan Huang,
Xinyu Tang,
Song-Chun Zhu
IEEE International Conference on Computer Vision (ICCV) 2019
* Equal contributions Paper Propose a new problem of understanding human gaze communication in social
videos
from both atomic-level and event-level, which is significant for studying human
social
interactions.
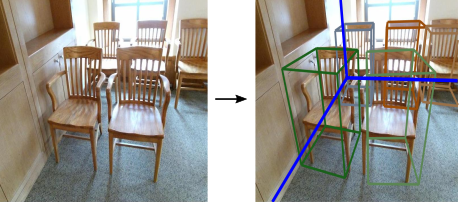
Cooperative Holistic Scene Understanding: Unifying 3D Object, Layout, and
Camera
Pose Estimation Siyuan Huang,
Siyuan Qi,
Yinxue Xiao,
Yixin Zhu,
Ying Nian Wu,
Song-Chun Zhu
Neural Information Processing Systems (NeurIPS) 2018 Paper /
Supplementary /
Poster /
Video /
Code /
Project Propose an end-to-end model that simultaneously solves tasks of 3D object
detection, 3D layout estimation and camera pose estimation in real-time given only a
single RGB image
Holistic 3D Scene Parsing and Reconstruction from a Single RGB Image
Siyuan Huang,
Siyuan Qi,
Yixin Zhu,
Yinxue Xiao,
Yuanlu Xu,
Song-Chun Zhu
European Conference on Computer Vision (ECCV) 2018 Paper /
Supplementary /
Project /
Code /
Poster /
Bibtex Propose a computational framework to parse and reconstruct
the 3D configuration of an indoor scene from a single RGB image in an
analysis-by-synthesis fasion using
a stochastic grammar model.
Configurable 3D Scene Synthesis and 2D Image Rendering
with Per-Pixel Ground Truth using Stochastic Grammars
* Equal contributions
Internatianal Journal of Computer Vision (IJCV) 2018 Paper /
Demo Employ physics-based rendering to synthesize photorealistic RGB images while
automatically synthesizing detailed,per-pixel ground truth data, including visible
surface depth and normal, object identity and material information, as well as
illumination.
Human-centric Indoor Scene Synthesis using Stochastic Grammar Siyuan Qi,
Yixin Zhu ,
Siyuan Huang,
Chenfanfu
Jiang ,
Song-Chun Zhu
IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2018 Paper /
Project /
Code /
Bibtex Present a human-centric method to sample and synthesize 3D room layouts and
2D
images thereof, for the purpose of obtaining large-scale 2D/3D image data with the
perfect per-pixel ground truth.
Predicting Human Activities Using Stochastic Grammar Siyuan Qi,
Siyuan Huang,
Ping Wei,
Song-Chun Zhu
IEEE International Conference on Computer Vision (ICCV) 2017 Paper /
Bibtex /
Code Use a stochastic grammar model to capture the compositional structure of
events,
integrating human actions, objects, and their affordances for modeling the rich
context
between human and environment.
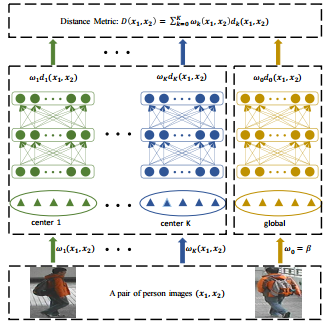
Nonlinear Local Metric Learning for Person Re-identification
Siyuan Huang,
Jiwen
Lu,
Jie Zhou,
Anil K. Jain
arXiv 2015 arXiv Paper Utilize the merits of both local metric learning and deep neural network to
exploit the complex nonlinear transformations in the feature space of person
re-identification data.
Building Change Detection Based on 3D reconstruction
Baohua Chen,
Lei
Deng,
Yueqi
Duan,
Siyuan Huang,
Jie Zhou
IEEE International Conference on Image Processing (ICIP) 2015 Paper /
Bibtex Propose a change detection framework based on RGB-D map generated by 3D
reconstruction which can overcome the large illumination changes .